Paano gumawa ng isang transpormer na winding counter mula sa isang calculator. Electronic thread counter para sa winding machine
Opsyon 1: ATmega8 + Nokia 5110 LCD + 3V power supply
Ang circuit ay gumagamit ng Atmega8-8PU (panlabas na kuwarts na may dalas na 8MHz), Nokia 5110 LCD at isang transistor para sa pagproseso ng mga pulso mula sa isang reed switch. Ang 3.3V boltahe regulator ay nagbibigay ng kapangyarihan sa buong circuit.
Ang lahat ng mga bahagi ay naka-mount sa breadboard, kabilang ang mga konektor para sa: ISP programmer (USBAsp), 5110 Nokia LCD, power (5V na ibinibigay sa 3.3V regulator), reed switch, reset button at isang 2-pin connector na ginagamit upang basahin ang winding polarity machine drive motor para malaman kung tataas o babawasan ang counter.
Layunin ng mga konektor:
J1: Kapangyarihan. Ang 5V ay ibinibigay sa connector at pagkatapos ay sa L7833 stabilizer para makuha ang 3.3V na boltahe na ginagamit ng ATmega8 at LCD.
J2: LCD connector para sa Nokia 5110 LCD.
J3: Reed switch. Pulse input para sa pagbibilang ng microcontroller.
J4: Polarity connector. Dapat itong konektado sa parallel sa motor winding. Ang tracking circuit ay idinisenyo para sa isang 12-volt na motor, ngunit maaari itong mailapat sa iba pang mga boltahe ng motor sa pamamagitan ng pagsasaayos ng mga halaga ng mga divider ng boltahe na nabuo ng R3-R4 at R5-R6. Kung ang motor ay konektado sa tuwid na polarity, ang PD0 ay magkakaroon ng mataas na log. antas, kung ang motor ay konektado sa reverse polarity, pagkatapos ay magkakaroon ng mataas na log ang PD1. antas. Ang impormasyong ito ay ginagamit sa code upang dagdagan o bawasan ang counter.
J5: Counter reset. Kapag pinindot mo ang pindutan, ire-reset ang counter.
ISP Connector: Ito ay isang 10-pin connector para sa USBAsp AVR programmer.
Diagram ng device
Larawan ng tapos na device





Opsyon 2: ATmega8 + 2x16 HD44780 LCD + 5V power supply
Ang ilan sa aking mga mambabasa ay humiling ng isang bersyon ng counter na gumagamit ng 2x16 HD44780 na display (o isang mas maliit na 1x16 na variant). Ang mga display na ito ay nangangailangan ng 5V supply voltage, kaya ang 3.3V stabilizer ay hindi nauugnay.
Diagram ng device


Microcontroller configuration bits para sa parehong mga opsyon: LOW - 0xFF, HIGH - 0xC9.
| Archive para sa artikulong "Coil counter para sa winding machine" | |
| Paglalarawan:
Source code (C), mga file ng firmware para sa microcontroller |
|
| Laki ng file: 111.35 KB Bilang ng mga pag-download: 257 |
Nagkataon na nagkaroon ako ng pagnanasa na i-wind ang transpormer, magiging maayos ang lahat, ngunit wala lang akong sapat na makina - doon nagsimula ang lahat! Ang isang paghahanap sa Internet ay nagbunga ng ilang posibleng opsyon para sa paggawa ng machine-tool, ngunit ang ikinalito ko ay ang pagbibilang ng mga liko ay ginagawa muli gamit ang isang mekanikal na counter na kinuha mula sa isang speedometer o isang lumang tape recorder, pati na rin ang mga switch ng tambo na may mga calculator. Hm…. Talagang hindi ko kailangan ng mekanika, sa mga tuntunin ng isang metro, wala akong anumang mga speedometer na i-disassemble, at wala rin akong mga karagdagang calculator. Oo, at gaya ng sinabi ni Kasama. Serega mula sa RadioKat: " Mahusay na mga inhinyero ng elektroniko, madalas na masamang mekaniko! Maaaring hindi ako ang pinakamahusay na inhinyero ng electronics, ngunit tiyak na ako ay isang masamang mekaniko.
Samakatuwid, nagpasya akong gumawa ng isang electronic meter, at ipagkatiwala ang pagbuo ng buong mekanikal na bahagi ng aparato sa pamilya (sa kabutihang palad, ang aking ama at kapatid na lalaki ay aces sa mekanika).
Nang masuri ang isang lugar patungo sa isa pa, napagpasyahan kong sapat na para sa akin ang 4 na numero ng mga tagapagpahiwatig - hindi iyon marami - hindi kaunti, ngunit 10,000 pagliko. Ang buong gulo ay makokontrol ng isang controller, ngunit tila sa akin na ang aking paboritong ATtiny2313 at ATmega8 ay talagang hindi comme il faut na magtulak sa isang walang kabuluhang aparato, ang gawain ay simple at kailangan itong lutasin nang simple. Samakatuwid, gagamitin namin ang ATtiny13 - marahil ang pinaka "patay" na MK na ibinebenta ngayon (hindi ako kumukuha ng mga PIC o MCS-51 - maaari ko lamang itong i-program, ngunit hindi ko alam kung paano magsulat ng mga programa para sa kanila) . Ang maliit na batang babae na ito ay walang sapat na mga paa, kaya walang pumipigil sa amin na ilakip ang mga rehistro ng shift sa kanya! Nagpasya akong gumamit ng hall sensor bilang speed sensor.
Nag-sketch ako ng diagram:
Hindi ko nabanggit kaagad ang mga buton - ngunit saan tayo kung wala ang mga ito? Hanggang sa 4 na piraso bilang karagdagan sa pag-reset (S1).
S2 - i-on ang paikot-ikot na mode (ang mode ay itinakda bilang default) - sa bawat rebolusyon ng axis na may likid ay tataas nito ang halaga ng bilang ng mga pagliko ng 1
S3 - winding mode, nang naaayon, sa bawat rebolusyon, babawasan nito ang halaga ng 1. Maaari mong i-wind ang maximum hanggang sa "0" - hindi ito wind sa minus :)
S4 - pagbabasa ng impormasyon na nakaimbak sa EEPROM.
S5 - pagsusulat ng kasalukuyang halaga + mode sa EEPROM.
Naturally, dapat nating tandaan na pindutin ang paikot-ikot na pindutan kung kami ay pagpunta sa wind ang mga liko, kung hindi, sila ay patagin. Posibleng mag-install ng 3 hall sensors o isang valcoder sa halip na 1 at baguhin ang controller program upang piliin nito ang mismong direksyon ng pag-ikot, ngunit sa palagay ko sa kasong ito ay hindi ito kailangan.
Ngayon hindi gaanong ayon sa scheme:
Gaya ng nakikita mo, walang supernatural dito. Ang lahat ng kahihiyan na ito ay pinalakas ng 5V, ang kasalukuyang kumakain ng isang bagay sa rehiyon ng 85mA.
Mula sa TLE4905L hall sensor (maaari mong subukang mag-plug sa isa pa, pinili ko batay sa prinsipyo ng "anuman ang mas mura at magagamit"), ang signal ay ipinadala sa controller, isang interrupt ay nabuo at ang kasalukuyang halaga ay nagbabago, depende sa ang napiling mode. Ang controller ay nagpapadala ng impormasyon sa shift registers, kung saan ito, naman, ay ipinapadala sa pitong-segment indicator o sa keyboard. Gumamit ako ng pitong-segment na anode na may isang karaniwang katod, agad akong nagkaroon ng isang quartet sa isang kaso, ngunit walang sinuman ang nag-abala sa mga gustong mag-tornilyo sa 2 double o 4 na solong anode na konektado nang magkatulad. Ang tuldok sa mga indicator ay hindi ginagamit; samakatuwid, ang H (dp) pin ay nakabitin sa hangin. Ang mga tagapagpahiwatig ay gumagana sa dynamic na mode, kaya ang paglaban sa R3-R9 ay mas mababa kaysa sa kinakalkula na halaga. Ang mga driver para sa mga tagapagpahiwatig ay binuo sa mga transistors VT1-VT4. Posibleng gumamit ng mga dalubhasang microcircuits tulad ng ULN2803, ngunit nagpasya ako sa mga transistor, sa simpleng dahilan na naipon ko ang mga ito - "tulad ng dumi", ang ilan sa kanila ay mas matanda kaysa sa akin.
Mga Pindutan S2-S4 - isang la matrix na keyboard. Ang "mga output" ng mga pindutan ay nakabitin sa parehong mga konduktor tulad ng mga input ng rehistro, ang katotohanan ay na pagkatapos magpadala ng data mula sa controller sa mga rehistro, maaaring magkaroon ng isang senyas ng anumang antas sa mga input ng SHcp at Ds, at ito ay hindi makakaapekto sa mga nilalaman ng mga rehistro sa anumang paraan. Ang "mga input" ng mga pindutan ay nakabitin sa mga output ng mga rehistro, ang paglipat ng impormasyon ay nangyayari nang humigit-kumulang tulad ng sumusunod: una, ang controller ay nagpapadala ng impormasyon sa mga rehistro para sa kasunod na paglipat sa mga tagapagpahiwatig, pagkatapos ay nagpapadala ng impormasyon upang i-scan ang mga pindutan. Ang mga resistors R14-R15 ay kinakailangan upang maiwasan ang "paglalaban" sa pagitan ng mga binti ng mga rehistro/controller. Ang pagpapadala ng impormasyon sa display at upang i-scan ang keyboard ay nangyayari sa isang mataas na dalas (ang panloob na generator sa Tini13 ay nakatakda sa 9.6 MHz), nang naaayon, gaano man kabilis namin subukang pindutin at bitawan ang pindutan, sa panahon ng pagpindot doon ay magiging maraming mga operasyon at, nang naaayon, ang zero mula sa pindutan ay tatakbo patungo sa pulong ng isa mula sa controller. Well, tulad ng isang hindi kanais-nais na bagay bilang ang dumadagundong ang mga contact na pindutan muli.
Gamit ang mga resistors R16-R17, hinihila namin ang aming keyboard sa + power supply, upang sa panahon ng idle time, isang 1 at hindi isang Z na estado ang magmumula sa mga output ng keyboard patungo sa mga input ng controller, na hahantong sa mga maling positibo. Posibleng gawin nang wala ang mga resistor na ito; may sapat na panloob na pull-up resistors sa MK, ngunit hindi ko magawang alisin ang mga ito - pinoprotektahan ng Diyos ang maingat.
Ayon sa scheme, tila iyon lang; para sa mga interesado, nagbibigay ako ng isang listahan ng mga bahagi. Hayaan akong magpareserba kaagad na ang mga denominasyon ay maaaring magkaiba sa isang direksyon o iba pa.
Ang IC1 ay isang ATtiny13 microcontroller, maaaring gamitin sa letrang V. Ang pinout para sa SOIC na bersyon ay kapareho ng sa diagram. Kung sinuman ang may pagnanais na gumamit ng QFN/MLF sa kaso, ang datasheet ay nasa kanilang mga kamay.
IC2-IC3 - 8-bit shift registers na may latch sa output - 74HC595, sa breadboard na ginamit ko sa DIP packages sa board sa tapos na device sa SOIC. Ang pinout ay pareho.
Ang IC4 ay isang digital unipolar hall sensor na TLE4905L. Ang mga kable ayon sa datasheet ay R2 - 1k2, C2-C3 ng 4n7. Kapag ini-install ang sensor sa makina, suriin kung saang bahagi ng magnet ito tumutugon.
Ang C1, C4 at C5 ay mga power supply filtering capacitor, nag-install ako ng 100n bawat isa, dapat silang mai-install nang mas malapit hangga't maaari sa mga supply pin ng microcircuits.
R1 - na may isang risistor hinihila namin ang reset leg sa power supply, 300 Ohm - at iba pa. 1k ang taya ko.
R3-R9 - kasalukuyang naglilimita sa mga resistor para sa mga tagapagpahiwatig. 33 Ohm - 100 Ohm, kung mas mataas ang resistensya, magiging mas malabo ang ilaw.
R10-R13 - limitahan ang kasalukuyang sa mga circuit ng base ng transistor. Sa breadboard mayroong 510 Ohms, at na-screw ko ang 430 Ohms sa board.
VT1-VT4 - KT315 na may anumang mga indeks ng titik, maaaring mapalitan ng KT3102, KT503 at mga analogue.
R14-R15, tulad ng nakasulat sa itaas, upang maiwasan ang "pag-away", sa tingin ko maaari mong itakda ito mula sa 1k at mas mataas, ngunit huwag itaas ito sa itaas ng 4k7. Sa R16-R17 na katumbas ng 300 Ohms, ang kabuuang paglaban ng mga resistor na konektado sa serye ay hindi dapat lumampas sa 5k; sa panahon ng aking mga eksperimento, na may pagtaas ng resistensya sa itaas ng 5k, lumitaw ang mga maling tugon sa pindutan.
Matapos suriin ang pagpapatakbo ng metro sa breadboard, oras na upang tipunin ang piraso ng hardware sa isang "kumpletong aparato".
Ang board ay inilatag sa SL, at malamang na hindi ito inilatag nang husto - inayos ko ito sa mga umiiral na bahagi, tinatamad akong pumunta sa palengke para bumili ng iba. Sa pangkalahatan, ikinalat ko ito at ini-print sa transparent na single-sided na Lomond film para sa mga black and white laser printer. Naka-print sa negatibo, sa 2 kopya. Negative - dahil gagawin ko ang PP gamit ang film photoresist, at ito naman ay NEGATIVE. At sa 2 kopya - upang kapag pinagsama, makuha mo ang pinaka opaque na layer ng toner. Wala rin akong pagnanais para sa isang lata ng aerosol TRANSPARENT 21
bumili.
Pinagsasama namin ang mga photomask, inilalantad ang mga ito "sa liwanag" upang ang mga butas ay magkatugma nang perpekto, at i-secure ang mga ito ng isang regular na stapler - ang pamamaraang ito ay dapat na lapitan nang responsable, ang kalidad ng hinaharap na board ay higit na nakasalalay dito.
Ngayon kailangan nating ihanda ang foil PCB. Ang ilang mga tao ay kuskusin ito ng pinong papel de liha, ang iba ay may pambura, ngunit kamakailan ay mas gusto ko ang mga sumusunod na opsyon:
1. Kung ang tanso ay hindi masyadong marumi sa mga oxide, punasan lamang ito ng isang pamunas na isinawsaw sa ammonia - naku, mabahong basura, sasabihin ko sa iyo, hindi ko gusto ang aktibidad na ito, ngunit ito ay mabilis. Sa isip, ang tanso ay hindi magniningning pagkatapos nito, ngunit ang alkohol ay hugasan ang mga oksido at ang board ay mauukit.
2. Kung medyo marumi ang tanso, pinapakintab ko ito ng felt wheel. Isinabit ko ito sa drill and voila. Hindi na kailangang maging partikular na masigasig dito; hindi ako gumagamit ng GOI paste; para sa kasunod na pag-ukit, isang nadama na bilog lamang ang sapat. Mabilis at mahusay.
Sa pangkalahatan, inihanda namin ito - hindi ako makapag-post ng isang larawan, ang impeksyon ay kumikinang na parang salamin at walang nakikita sa larawan, ako rin ay isang masamang photographer.
Well, okay, pagkatapos ay i-roll namin ang photoresist.
Dapat kong aminin na ang aking photoresist ay lumampas sa petsa ng pag-expire nito at ang aso ay tumangging dumikit sa board, kaya kailangan kong painitin muna ang board. Pinainit ko ito ng hairdryer, ngunit maaari ka ring gumamit ng plantsa. Magiging maganda, siyempre, na magkaroon ng isang laminator para sa mga layuning ito, ngunit:
- ang masa naaawa ako sa kanya ngayon
- kapag hindi ko inisip ang kuwarta, tamad lang ako :)
I-roll namin ang photoresist sa mainit na board, hindi nalilimutan na alisin ang proteksiyon na pelikula. Sinusubukan naming gawin ito nang maingat hangga't maaari upang walang mga bula ng hangin sa pagitan ng board at ng photoresist. Ang pakikipaglaban sa kanila mamaya ay isang hiwalay na asno. Kung lumitaw ang mga bula, tinutusok ko sila ng isang karayom.
Maaari kang gumulong sa anumang pag-iilaw at hindi makisali sa mga crap, pag-alala sa mga amateur photographer, ang pangunahing bagay sa aming negosyo ay ang kawalan ng sikat ng araw at iba pang mga mapagkukunan ng ultraviolet radiation.
Pagkatapos ng knurling, pinainit ko ang board gamit ang isang mainit na bakal sa pamamagitan ng isang pahayagan, ito ay nagpapagaling sa mga nabutas na bula, at ang photoresist ay dumidikit nang mahigpit.
Susunod, inilalagay namin ang template sa board, dito ang board ay double-sided, kaya ang template ay nasa magkabilang panig ng board. Inilalagay namin ang "sandwich" na ito sa isang sheet ng plexiglass at pinindot ito gamit ang pangalawang sheet sa itaas. 2 sheet ang kailangan upang matapos na malantad ang isang gilid, maingat mong iikot ang board nang hindi ginagalaw ang photomask.
Sindiin natin ito mula sa kabilang panig. Ginagamit ko ang lampara na ito:
Nag-iilaw ako mula sa layo na humigit-kumulang 150mm sa loob ng 7 minuto (pinag-eksperimentong pinili ang distansya at oras).
Susunod, maghanda ng mahinang alkalina na solusyon - isang kutsarita ng soda ash bawat kalahating litro ng tubig. Ang temperatura ng tubig ay hindi mahalaga. Haluin hanggang matunaw ang lahat ng soda. Ang solusyon na ito ay hindi mapanganib para sa iyong mga kamay; ito ay parang tubig na may sabon sa pagpindot.
Inalis namin ang proteksiyon na pelikula mula sa aming board at itapon ito sa solusyon, pagkatapos nito ay aktibong sinimulan naming kuskusin ito ng isang brush - ngunit huwag pindutin nang napakalakas upang hindi mapunit ang mga track. Maaari mong, siyempre, hindi kuskusin ito, ngunit pagkatapos ay mayroong isang pagpipilian upang hugasan ang photoresist:
- sa mahabang panahon
- lahat ay maliligo
ngunit ni isa o ang isa ay hindi nababagay sa atin, samakatuwid tatlo.
nakakakuha tayo ng katulad:
Banlawan namin ang board ng tubig, huwag ibuhos ang solusyon - kakailanganin namin ito mamaya. Kung sa panahon ng pagbuo ng board ang ilang mga track ay natuklap o ang mga bula ng hangin ay nasira ang mga track, kailangan mong i-retouch ang mga lugar na ito na may tsapon na barnis o isang espesyal na marker. Susunod na i-ukit namin ang board. Gumagamit ako ng ferric chloride.
Pagkatapos ng pag-ukit, hinuhugasan namin muli ang board gamit ang tubig at itatapon ito pabalik sa alkaline solution upang hugasan ang hindi na kinakailangang photoresist. Sapat na ang isang oras.
Sunod naman tayong maglokohan. Para sa mga maliliit na circuit board o mga napaka-alahas, gumagamit ako ng Rose alloy; para sa mga circuit board, pinahiran ko lang ang lata sa board gamit ang isang panghinang na may flat tip. Sa kasong ito, makatuwirang lagyan ng flux ang board; Gumagamit ako ng regular na alcohol-rosin.
Maaaring tila sa ilan na ang mga landas ay hindi lumabas nang napakakinis - ang mga landas ay lumabas na makinis :) ito ang halaga ng pamamaraan ng tinning na may isang panghinang na bakal, ang lata ay hindi nakahiga nang pantay.
Sa natapos na bersyon ay walang pindutan ng pag-reset - mabuti, wala akong idikit ito sa board, kaya walang sapat na espasyo, at kung ang MK ay nag-freeze, pagkatapos ay patayin ko ang kapangyarihan at i-on muli. Lumitaw din ang isang diode sa circuit ng kuryente - proteksyon laban sa pagbabalik ng polarity. Tulad ng para sa iba pang bahagi, ginamit ko lamang ang mga nasa kamay, kaya naman mayroong parehong SMD at regular na mga kaso.
Nag-attach kami ng sensor sa nakatigil na bahagi ng makina, at nag-install ng magnet sa rotation axis upang kapag umiikot ay pumasa ito ng 3-5 mm mula sa sensor. Sige, gamitin natin :)
Iyan lang ang sigurado ngayon, salamat sa lahat ng iyong atensyon, at mga kasama GP1 At Avreal para sa tulong sa pag-unlad.
Sa huling artikulong ibinahagi ko sa inyo, . Ang makapal na wire ay nasugatan nang manu-mano, dahil hindi posible na maingat na ilagay ang coil sa coil sa anumang iba pang paraan sa bahay. Sa isang mas maliit na diameter ng winding wire, maaaring gamitin ang isang mas teknolohikal na advanced na paraan, na magbabawas ng oras at pagsisikap sa panahon ng paikot-ikot, at din, na mahalaga, ang paggawa ng transpormer ay hindi magkakaiba mula sa bersyon ng pabrika. Susunod, ilalarawan namin ang simpleng disenyo ng isang homemade winding machine, kung saan maaari mong madaling wind coils, chokes, power at sound transformer.
Ang base (kama) ng winding machine
Maaari kang gumawa ng isang makina para sa paikot-ikot na mga transformer mula sa anumang matibay, madaling maproseso na materyal. Ang pinaka-angkop ay: metal, playwud (kahoy) o plastik. Depende sa kung ano ang mayroon ka at kung ano ang gusto mong magtrabaho kasama ang karamihan, maaari kang magbigay ng kagustuhan sa isang materyal o iba pa.
Kadalasan ay gumagawa ako ng mga lutong bahay na bagay mula sa kung ano ang mayroon ako, at sa kasong ito, sa mga durog na basura na tinatawag na "kapaki-pakinabang sa paligid ng bahay" ay nakakita ako ng mga scrap ng 10 mm semi-rigid na plastik, na matagumpay kong ginamit sa disenyo ng winder at mga elemento nito.
Sa una, sa panahon ng pag-unlad, kinakailangan na gumawa ng isang layout ng pagsubok, isipin ang layout ng winder, at tanungin ang iyong sarili kung anong mga kinakailangang function ang dapat gawin ng device. Sa panahon ng proseso ng prototyping, madaling magdagdag at mapabuti, ayusin ang mga sukat, na magbibigay-daan sa iyo upang makuha ang pinakamatagumpay na opsyon sa dulo.
Ayon sa proyekto, mayroon kaming tatlong axes:
Ang unang axis (winder) - ang winding coil ng transpormer ay iikot dito. Sa isang dulo ay magkakaroon ng counter para sa bilang ng mga pagliko na ginawa, at sa kabilang dulo ay magkakaroon ng axle rotation drive na may isang hanay ng mga pulley. Ang drive ay maaaring manu-mano sa anyo ng isang hawakan na nakakabit sa isang axis o electric sa anyo ng isang stepper motor.
Ang pangalawang axis (stacker) - ang lead ng wire stacker ay "tatakbo" dito, at ang pangalawang hanay ng mga pulley ay ikakabit sa axis, na kung saan ay mai-interface sa unang hanay ng mga pulley sa unang axis sa pamamagitan ng isang sinturon magmaneho gamit ang sinturon.
Ang ikatlong axis (reel holder) ay nagsisilbing suporta para sa reel na may winding wire.
Sa yugto ng disenyo, kinakailangan na i-space nang tama ang mga axes sa pagitan ng bawat isa upang ang frame ng winding transformer coil ay hindi kumapit sa makina at hindi hawakan ang isa pang axis, at piliin din ang taas ng wire coil upang ikaw ay maaaring malayang mag-hang ng mga coils na may iba't ibang laki. Maaaring magbigay ng karagdagang axis para sa winding at winding wire mula sa reel hanggang sa reel.
Ayon sa mga marka sa napiling materyal para sa kama, gamit ang isang hacksaw para sa metal, pinutol namin ang mga bahagi ng base ng makina (mga gilid, ibaba, mga miyembro ng krus), at nag-drill din ng mga kinakailangang butas. Gamit ang mga metal na sulok at self-tapping screws, pinagsama namin ang lahat ng mga bahagi.




Revolution counter para sa pagbibilang ng mga liko
Ang isang rebolusyon ay katumbas ng isang pagliko - ito ay kung paano ko ginamit upang makalkula sa aking ulo kapag paikot-ikot ang isang transpormer sa isang primitive na aparato. Sa pagdating ng isang ganap na paikot-ikot na makina na may ibinigay na counter, naging mas madali ito, ngunit ang pinakamahalagang bagay ay kapag lumiliko ang paikot-ikot, ang rate ng error ay nabawasan sa halos zero.

Ang winder na isinasaalang-alang ay gumagamit ng mechanical counter UGN-1 (SO-35) mula sa kagamitang Sobyet. Maaari itong palitan ng metro ng bisikleta o isang mekanikal na counter mula sa isang lumang tape recorder ng sambahayan, kung saan sinukat nito ang pagkonsumo ng tape. Maaari ka ring mag-ipon ng isang simpleng metro gamit ang iyong sariling mga kamay, na mayroon lamang isang calculator, isang switch ng tambo, dalawang wire at isang magnet.
I-disassemble ang calculator sa dalawang contact na isinara ng "equal" na buton, maghinang ng dalawang wire, at maghinang ng switch ng tambo sa mga dulo ng mga wire. Kung magdadala ka ng magnet sa reed switch, ang mga plato nito sa loob ng glass flask ay magsasara at ang calculator ay gayahin ang pagpindot sa isang button. Gamit ang 1+1 karagdagan function ng calculator, maaari mong bilangin ang mga rebolusyon.



Susunod, ikinakabit namin ang homemade disk sa unang axis. Nagpapadikit kami ng magnet sa disk, at nakakabit ng reed switch sa katawan ng makina o bracket. Ipinoposisyon namin ang switch ng tambo upang kapag umiikot ang disk, ang magnet ay pumasa sa tabi ng switch ng tambo at isinara ang mga contact nito.
Gamit ang prinsipyong ito, maaari mong palitan ang reed switch ng limit switch, at gawin ang disk sa anyo ng isang sira-sira. Ang sira-sira na disk, na umiikot kasama ang matambok na bahagi nito, ay pipindutin sa switch ng limitasyon
Coil stacker
Ang wire layer ay ginagamit para sa unipormeng paikot-ikot, turn to turn, ng winding wire papunta sa frame ng transformer o coil na ginagawa. Ang paikot-ikot na density ay depende sa bilis kung saan ang mga axes ay umiikot, pati na rin sa diameter ng napiling wire. Ang kinakailangang ratio ng bilis ng pag-ikot ng una at pangalawang axle ay maaaring makamit gamit ang mga pulley at isang belt drive. Kapag gumagana ang maayos na mekanismo ng makina, ang stacker roller ay sabay-sabay na gumagalaw sa isang tiyak na pitch at ang wire ay inilalagay sa frame ng winding transformer. Hindi ito maipaliwanag sa maikling salita, ngunit sa karagdagang pagbabasa ng artikulo ang lahat ay magiging malinaw.
Ang disenyo na pinag-uusapan ay gumagamit ng isang factory-made M6 rod stud na may thread pitch na 1 mm. Ang mga bearings ay naayos na parallel sa bawat isa sa mga sidewalls ng winding machine bed sa mga pre-drilled hole para sa kanila, pagkatapos ay isang pin ay ipinasok sa kanila. Para sa pinakamahusay na pag-slide, lubricate ang mga bearings. Ang isang guide roller ay gumagalaw sa pin, kung saan ang wire ay sinulid.


Maaari kang gumawa ng isang guide roller para sa pagtula ng wire sa iyong sarili, na mayroong isang maliit na piraso ng hugis-U na profile na aluminyo, isang pinahabang bushing nut na tumutugma sa sinulid ng stud, at isang feed roller na may uka sa gitna.

Ang mga butas parallel sa bawat isa ay drilled sa U-shaped profile. Ang tuktok na pares ng mga butas ay para sa roller, at ang ilalim na pares ay para sa pinahabang nut. Ang diameter ng itaas na mga butas sa mga dingding ng profile ay pinili sa kahabaan ng axis kung saan maaayos ang roller, at ang mga mas mababa ay isang milimetro na mas malaki kaysa sa diameter ng thread ng stud. Ang isang pinahabang nut ay mahigpit na inaayos upang magkasya sa distansya sa pagitan ng mga profile wall. Ang istraktura na ito ay pagkatapos ay screwed papunta sa paver stud.




Ang stud ay sinigurado ng mga mani sa mga gilid upang maaari itong paikutin nang walang pag-aalis. Ang isang ekstrang pin ay naiwan sa isang gilid upang ang mga pulley ay maaaring i-screw dito upang i-mate ang una at pangalawang axle.
Dalawang pulley ay konektado sa pamamagitan ng isang belt drive
Ang mga axle sa winding machine ay konektado sa isa't isa sa pamamagitan ng isang sistema ng mga pulley na may iba't ibang radii. Ang mga pulley na nakakabit sa mga axle ay umiikot gamit ang isang belt drive. Ang sinturon ay ginagamit bilang sinturon.
— Ang stacker axis pulley ay 100mm;
— Ang pulley sa axis na may nakakabit na coil (winder) ay katumbas ng kapal ng kinakailangang wire, na pinarami ng 100.
Halimbawa, para sa 0.1 mm wire, gumagamit kami ng 10 mm pulley sa axis ng winder. Para sa diameter na 0.25 wire, isang 25 mm pulley.
Kung maaari, mas mahusay na gumawa ng mga pulley na may pitch na 1 mm at piliin ang mga ito sa panahon ng proseso ng paikot-ikot gamit ang formula na ito
Ang error ay nakasalalay sa katumpakan ng diameter ng mga manufactured pulley at ang pag-igting ng sinturon. Kung gumagamit ka ng isang stepper motor na may gear transmission bilang isang drive sa disenyo sa halip na isang sinturon at tiyak na pinutol na mga pulley, kung gayon ang error ay maaaring dalhin nang mas malapit sa zero.
Ngayon sasabihin ko sa iyo kung paano gumawa ng pulley gamit ang iyong sariling mga kamay sa bahay nang hindi lumingon sa isang turner. Ang aking hanay ng mga pulley ay gawa sa parehong materyal tulad ng kama ng winding machine. Gamit ang isang compass, minarkahan ko ang mga kinakailangang diameter ng mga pulley at nagdagdag ng ilang milimetro sa mas malaking bahagi upang makina ang uka para sa sinturon sa kinakailangang laki. Ang mga butas ay drilled kasama ang tabas ng mga marking na may isang distornilyador at mga partisyon ay pinutol sa pagitan nila. Kaya nakolekta ko ang kinakailangang bilang ng mga blangko para sa mga pulley. Gumamit ako ng hindi kinakailangang "Assistant" na gilingan ng karne bilang isang lathe.


Hindi ko maalala nang eksakto, pinutol ko ang isang thread sa motor shaft ng gilingan ng karne, o naging angkop ito, ngunit ang isang pin ay na-screwed sa isang mahabang bushing nut. Ang isang blangko na may bahagyang mas malaking diameter kaysa sa kinakailangang pulley ay inilagay sa stud sa pamamagitan ng mga nuts at washers. Ang gilingan ng karne ay binuksan at ang lahat ng mga iregularidad ay bilugan sa isang bilog na hugis na may metal na hacksaw/file, at isang uka (groove) para sa sinturon ay ginawa gamit ang isang file ng karayom. Sa panahon ng proseso, ang mga diameter ng mga lutong bahay na pulley ay pana-panahong sinuri gamit ang mga calipers.


Mga bahagi ng isang winding machine at ang prinsipyo ng pagpapatakbo nito
Ang mga elemento ng winding machine ay dahan-dahang binuo. Halos lahat ay kinuha mula sa lumang kagamitan sa pelikula ng Sobyet. Mga gumagalaw na bahagi: hawakan, axle studs, guide roller - lahat ay nilagyan ng mga bearings. Ang mga stud, nuts, washers at anggulo ay binili sa isang hardware store. Kailangan ko lang gumastos ng pera sa mga studs, long nuts at mga anggulo. Kung hindi, ang lahat ay ginawa mula sa magagamit na mga materyales.

Upang tumpak na piliin ang densidad ng paikot-ikot na kawad, isang hanay ng ilang mga pulley ay sinulid sa stacker pin. Kaya, sa kaso ng maluwag na paikot-ikot, posible na ilipat ang sinturon ng isang sukat at ayusin ang bilis ng pag-ikot ng mga palakol. Sa panahon ng proseso ng paikot-ikot na wire, ang sinturon ay pinaikot depende sa direksyon ng paikot-ikot na stroke ayon sa figure-of-eight na hugis o ang direktang posisyon ng sinturon. Dapat kang gumawa ng ilang dosenang pagsubok na pagliko upang wastong ayusin ang mga pulley sa diameter ng wire.


Ang isang base ay ginawa mula sa kahoy o iba pang materyal sa hugis ng loob ng transformer coil at naayos sa stud na may mga wing nuts. Maaari ka ring gumawa ng mga universal holding corner para ma-secure ang coil. Ang isang demonstrasyon ng pagpapatakbo ng winding machine ay ipinapakita sa video:
[Narito ang isang video ng proseso ng paikot-ikot na transpormer]




![]()
Tungkol sa may-akda:
Pagbati, mahal na mga mambabasa! Ang pangalan ko ay Max. Kumbinsido ako na halos lahat ay maaaring gawin sa bahay gamit ang iyong sariling mga kamay, sigurado ako na magagawa ito ng lahat! Sa aking libreng oras, gusto kong mag-tinker at lumikha ng bago para sa aking sarili at sa aking mga mahal sa buhay. Malalaman mo ang tungkol dito at marami pang iba sa aking mga artikulo!
Maraming mga gamit sa sambahayan at mga pang-industriyang automation device ng medyo kamakailang mga taon ng produksyon ay may mga mekanikal na counter na naka-install. Ang mga ito ay mga produkto sa isang conveyor belt, mga liko ng wire sa mga winding machine, atbp. Kung sakaling magkaroon ng kabiguan, ang paghahanap ng katulad na metro ay hindi madali, at imposibleng ayusin dahil sa kakulangan ng mga ekstrang bahagi. Ang may-akda ay nagmumungkahi na palitan ang mekanikal na counter ng isang electronic.
Ang isang elektronikong counter, na binuo upang palitan ang isang mekanikal, ay lumalabas na masyadong kumplikado kung ito ay binuo sa microcircuits na may mababa at katamtamang antas ng pagsasama (halimbawa, ang K176, K561 series). lalo na kung kailangan ng reverse account. At upang mapanatili ang resulta kapag ang kapangyarihan ay naka-off, ito ay kinakailangan upang magbigay ng isang backup na baterya.
Ngunit maaari kang bumuo ng isang counter sa isang chip lamang - isang unibersal na programmable microcontroller na may kasamang iba't ibang mga peripheral device at may kakayahang lutasin ang napakalawak na hanay ng mga problema. Maraming microcontroller ang may espesyal na lugar ng memorya - EEPROM. Ang data na nakasulat dito (kabilang ang panahon ng pagpapatupad ng programa), halimbawa, ang kasalukuyang resulta ng pagbibilang, ay nai-save kahit na pagkatapos na patayin ang kapangyarihan.
Ang iminungkahing counter ay gumagamit ng microcontroller Attiny2313 mula sa pamilyang Almel AVR. Ang aparato ay nagpapatupad ng reverse counting, na nagpapakita ng resulta na may pagkansela ng mga hindi gaanong halaga sa isang apat na digit na LED indicator, na iniimbak ang resulta sa EEPROM kapag patay ang kuryente. Ang isang analog comparator na binuo sa microcontroller ay ginagamit upang napapanahong tuklasin ang pagbaba sa boltahe ng supply. Naaalala ng counter ang resulta ng pagbibilang kapag naka-off ang power, ibinabalik ito kapag naka-on, at, katulad ng mechanical counter, ay nilagyan ng reset button.
Ang counter circuit ay ipinapakita sa figure. Anim na linya ng port B (РВ2-РВ7) at limang linya ng port D (PDO, PD1, PD4-PD6) ang ginagamit upang ayusin ang dynamic na indikasyon ng resulta ng pagbibilang sa LED indicator HL1. Ang mga collector load ng phototransistors VT1 at VT2 ay mga resistors na binuo sa microcontroller at pinagana ng software na kumokonekta sa kaukulang mga pin ng microcontroller sa power supply circuit nito.
Ang pagtaas sa resulta ng pagbibilang N ng isa ay nangyayari sa sandaling ang optical na koneksyon sa pagitan ng emitting diode VD1 at ang phototransistor VT1 ay nagambala, na lumilikha ng pagtaas ng pagkakaiba sa antas sa input ng INT0 ng microcontroller. Sa kasong ito, ang antas sa input ng INT1 ay dapat na mababa, ibig sabihin, ang phototransistor VT2 ay dapat na iluminado ng emitting diode VD2. Sa sandali ng tumataas na pagkakaiba sa input ng INT1 at mababang antas sa input ng INT0, bababa ng isa ang resulta. Ang iba pang mga kumbinasyon ng mga antas at ang kanilang mga pagkakaiba sa mga input na INT0 at INT1 ay hindi nagbabago sa resulta ng pagbibilang.
Kapag naabot na ang maximum na halaga ng 9999, magpapatuloy ang pagbibilang mula sa zero. Ang pagbabawas ng isa mula sa zero na halaga ay nagbibigay ng resulta na 9999. Kung hindi kailangan ang pagbibilang, maaari mong ibukod ang emitting diode VD2 at phototransistor VT2 mula sa counter at ikonekta ang INT1 input ng microcontroller sa karaniwang wire. Patuloy lamang na tataas ang bilang.
Tulad ng nabanggit na, ang detektor ng pagbaba ng boltahe ng supply ay ang analog comparator na binuo sa microcontroller. Inihahambing nito ang hindi matatag na boltahe sa output ng rectifier (diode bridge VD3) sa stabilized na boltahe sa output ng integrated stabilizer DA1. Paikot na sinusuri ng programa ang estado ng comparator. Matapos idiskonekta ang metro mula sa network, ang boltahe sa rectifier filter capacitor C1 ay bumababa, at ang nagpapatatag na boltahe ay nananatiling hindi nagbabago sa loob ng ilang panahon. Ang mga resistors R2-R4 ay pinili bilang mga sumusunod. na ang estado ng comparator sa sitwasyong ito ay baligtad. Ang pagkakaroon ng nakita na ito, ang programa ay namamahala upang isulat ang kasalukuyang resulta ng pagbibilang sa EEPROM ng microcontroller kahit na bago ito tumigil sa paggana dahil sa ang kapangyarihan ay naka-off. Sa susunod na i-on mo ito, babasahin ng program ang numerong nakasulat sa EERROM at ipapakita ito sa indicator. Magpapatuloy ang pagbibilang mula sa halagang ito.
Dahil sa limitadong bilang ng mga microcontroller pin, para ikonekta ang SB1 button, na nagre-reset sa counter, ginamit ang pin 13, na nagsisilbing inverting analog input ng comparator (AIM) at kasabay ng "digital" input ng PB1. Ang boltahe divider (resistors R4, R5) dito ay nagtatakda ng antas na nakikita ng microcontroller bilang mataas na lohikal. Kapag pinindot mo ang pindutan ng SB1, ito ay magiging mababa. Hindi ito makakaapekto sa estado ng comparator, dahil ang boltahe sa input ng AIN0 ay mas malaki pa rin kaysa doon sa AIN1.
Kapag pinindot ang pindutan ng SB1, ang programa ay nagpapakita ng isang minus sign sa lahat ng mga digit ng indicator, at pagkatapos na ilabas ito, magsisimula itong magbilang mula sa zero. Kung patayin mo ang kapangyarihan sa metro habang pinindot ang pindutan, ang kasalukuyang resulta ay hindi isusulat sa EEPROM, at ang halagang nakaimbak doon ay mananatiling pareho.
Ang programa ay idinisenyo sa paraang madali itong iakma sa isang metro na may iba pang mga tagapagpahiwatig (halimbawa, sa mga karaniwang cathode), na may ibang layout ng naka-print na circuit board, atbp. Ang isang bahagyang pagwawasto ng programa ay kinakailangan din kapag gamit ang isang quartz resonator para sa isang frequency na naiiba ng higit sa 1 MHz mula sa tinukoy.
Kapag ang source boltahe ay 15 V, sukatin ang boltahe sa mga pin 12 at 13 ng microcontroller panel na may kaugnayan sa karaniwang wire (pin 10). Ang una ay dapat na nasa hanay na 4...4.5 V, at ang pangalawa ay dapat na higit sa 3.5 V, ngunit mas mababa kaysa sa una. Susunod, ang boltahe ng pinagmulan ay unti-unting nabawasan. Kapag bumaba ito sa 9... 10 V, ang pagkakaiba sa mga halaga ng boltahe sa mga pin 12 at 13 ay dapat maging zero at pagkatapos ay baguhin ang sign.
Ngayon ay maaari mong i-install ang programmed microcontroller sa panel, ikonekta ang transpormer at ilapat ang mains boltahe dito. Pagkatapos ng 1.5...2 s kailangan mong pindutin ang SB1 button. Ipapakita ng counter indicator ang numero 0. Kung walang ipinapakita sa indicator, suriin muli ang mga halaga ng boltahe sa AIN0.AIN1 input ng microcontroller. Ang una ay dapat na mas malaki kaysa sa pangalawa.


Sa amateur radio practice, madalas na kailangang i-wind/rewind ang iba't ibang windings ng mga transformer, chokes, relays, atbp.
Sa pagbuo ng makinang ito, ang mga sumusunod na gawain ay itinakda:
1. Maliit na sukat.
2. Makinis na pagsisimula ng spindle.
3. Counter hanggang 10,000 turns (9999).
4. Paikot-ikot na may awtomatikong pagtula ng kawad. Paglalagay ng pitch (diameter ng wire) 0.02 - 0.4mm.
5. Posibilidad ng winding sectional windings nang walang reconfiguration.
6. Posibilidad ng pangkabit at paikot-ikot na mga frame na walang gitnang butas.
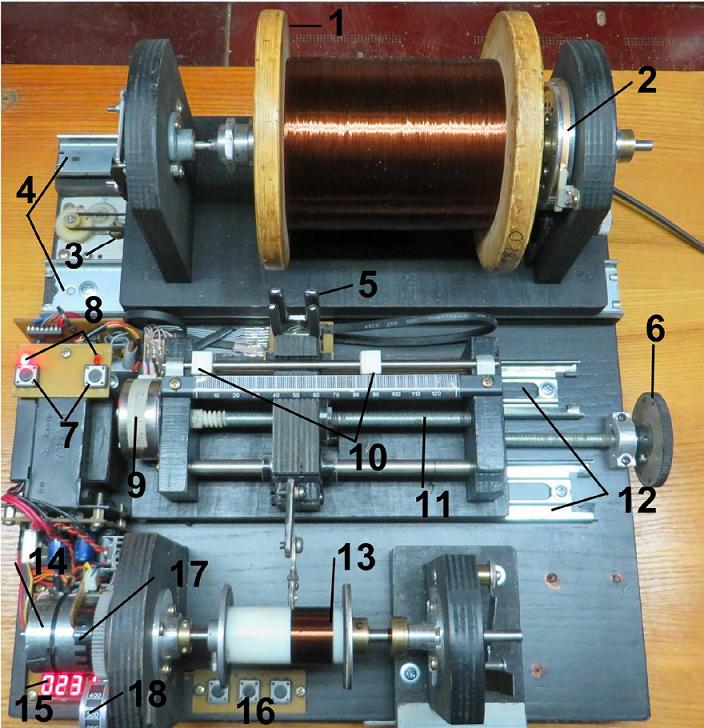
Larawan 1.
Panlabas na view ng winding machine.
Komposisyon ng winding machine.
1. Feed reel (reel of wire).
2. Pagpepreno (mekanismo ng preno).
3. Stepper motor para sa bobbin centering.
4. Mga gabay sa muwebles ng bola.
5. Shutter ng optical sensors ng reel centering mechanism.
6. Hawakan para sa paglipat ng positioner sa ibang seksyon kapag paikot-ikot na sectional windings.
7. Mga pindutan para sa manu-manong paglipat ng direksyon ng pagtula.
8. LEDs para sa pagtula ng direksyon.
9. Positioner stepper motor.
10. Mga shutter ng optical winding boundary sensors.
11. Positioner turnilyo.
12. Mga gabay sa muwebles ng bola.
13. Paikot-ikot na reel.
14. Paikot-ikot na motor.
15. Turn counter.
16. Mga pindutan ng pagtatakda.
17. Optical synchronization sensor.
18. Kontroler ng bilis.
Device at prinsipyo ng pagpapatakbo.
Unit ng pagpapakain.
Ang feeding unit ay idinisenyo upang ikabit ang isang reel ng wire na may iba't ibang laki dito, at magbigay ng tensyon sa wire.
Kabilang dito ang isang bobbin fastening mechanism at isang shaft braking mechanism.

Figure 2.
Unit ng pagpapakain.
Pagpreno.
Nang walang pagpepreno ang feed reel, ang paikot-ikot ng wire sa mga frame ay magiging maluwag at ang mataas na kalidad na paikot-ikot ay hindi gagana. Ang nadama na tape na "2" ay nagpapabagal sa drum "1". Ang pag-ikot ng lever "3" ay humihigpit sa spring "4" - pagsasaayos ng lakas ng pagpepreno. Para sa iba't ibang kapal ng wire, ang sarili nitong pagpepreno ay inaayos. Ang mga off-the-shelf na bahagi ng VCR ay ginagamit dito.

Larawan 3.
Mekanismo ng pagpepreno.
Bobbin centering.
Ang maliliit na sukat ng makina at ang lokasyon na malapit sa winding reel at ang feed reel na may wire ay nangangailangan ng pagpapakilala ng karagdagang mekanismo para sa pagsentro ng feed reel.


Larawan 4, 5.
Mekanismo ng pagsentro.
Kapag pinaikot ang coil, ang wire mula sa reel ay kumikilos sa shutter "5", na ginawa sa anyo ng isang "tinidor" at ang stepper motor "3", sa pamamagitan ng isang gearbox na may dibisyon 6 at isang may ngipin na sinturon, kasama ang mga gabay ng roller " 4", awtomatikong ginagalaw ang reel sa nais na direksyon.
Kaya, ang wire ay palaging nasa gitna, tingnan ang Fig. 4, Fig. 5:

Larawan 6.
Mga sensor, rear view.
Komposisyon at disenyo ng mga sensor.
19. Optical sensor para sa bobbin centering mechanism.
5. Isang kurtina na tumatakip sa mga sensor ng mekanismo ng pagsentro ng reel.
20. Mga kurtina na sumasaklaw sa mga sensor ng paglipat ng direksyon ng positioner.
21. Optical sensor para sa paglipat ng direksyon ng positioner.
Posisyoner.
Mga kurtina "20" fig. 6 - nakatakda ang paikot-ikot na hangganan. Ang stepper motor ay gumagalaw sa mekanismo ng stacker hanggang sa harangan ng kurtina ang isa sa mga sensor na "21" fig. 6, pagkatapos nito ay nagbabago ang direksyon ng pagtula.
Maaari mong baguhin ang direksyon ng pagtula anumang oras gamit ang mga pindutan "1" fig. 7.

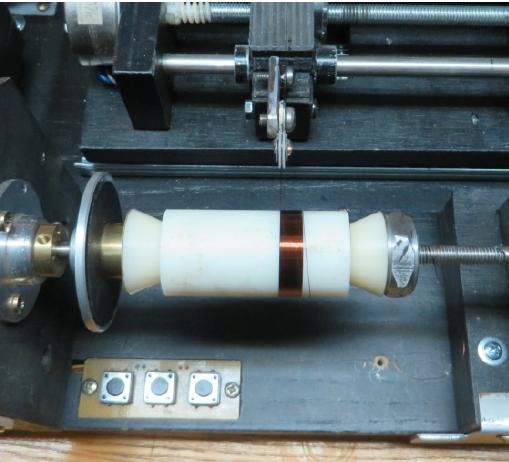
Larawan 7.
Stacker.
Bilis ng pag-ikot ng stepper motor "9" fig. 7, naka-synchronize gamit ang sensor "10", "11" Fig. 8, na may pag-ikot ng likid ng sugat at depende sa diameter ng wire na itinakda sa menu. Maaaring itakda ang diameter ng wire sa 0.02 - 0.4mm. Gamit ang knob "8" fig. 7, maaari mong ilipat ang buong positioner sa gilid nang hindi binabago ang paikot-ikot na mga hangganan. Sa ganitong paraan, posibleng i-wind ang isa pang seksyon sa mga multi-section na frame.

Larawan 8.
Optosensor.
Komposisyon ng positioner at opto-sensor (Larawan 7-8).
1. Mga pindutan para sa manu-manong paglipat ng direksyon ng pagtula.
2. LEDs para sa pagtula ng direksyon.
3. Mga kurtina na sumasaklaw sa mga sensor ng paglipat ng direksyon ng positioner.
4. Linear na tindig.
5. Caprolon nut.
6. Lead turnilyo. Diameter 8mm, thread pitch 1.25mm.
7. Mga gabay sa muwebles ng bola.
8. Hawakan para sa paglipat ng positioner sa ibang seksyon kapag paikot-ikot na sectional windings.
9. Stepper motor.
10. Optical timing sensor.
11. Disk na sumasaklaw sa synchronization sensor. 18 puwang.
Pagtanggap ng node.

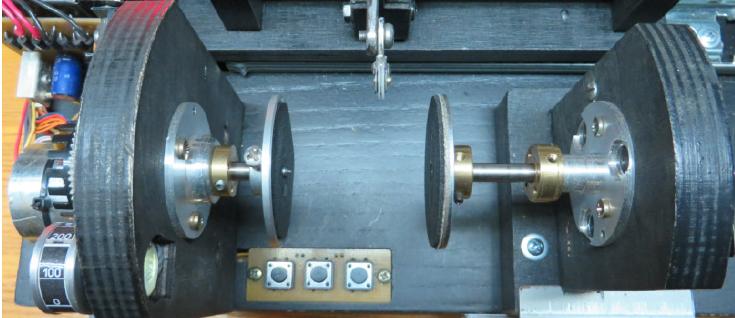
Larawan 9.
Pagtanggap ng node.


Larawan 10, 11.
Pagtanggap ng node.
1. Turn counter.
2. Commutator high-speed motor.
3. Reducer gear.
4. Button na “Counter reset”.
5. Pagsasaayos ng bilis.
6. "Start winding" switch.
7. Pangkabit ng winding reel.
Ang pag-ikot ng likid ng sugat ay ginawa ng isang high-speed commutator motor sa pamamagitan ng isang gearbox.
Ang gearbox ay binubuo ng tatlong gear na may kabuuang pitch na 18. Nagbibigay ito ng kinakailangang metalikang kuwintas sa mababang bilis.
Ang bilis ng motor ay nababagay sa pamamagitan ng pagpapalit ng boltahe ng supply.

Larawan 12, 13.
Pag-fasten ng isang frame na may butas.
Ang disenyo ng yunit ng pagtanggap ay nagbibigay-daan sa iyo upang i-fasten ang parehong mga frame na may gitnang butas at mga frame na walang ganoong mga butas, na malinaw na nakikita sa mga figure.

Larawan 14, 15.
Pag-fasten ng isang frame na walang butas.
Electrical diagram.

Larawan 16.
Electrical circuit ng winding machine.
Ang lahat ng mga proseso ng makina ay kinokontrol ng isang PIC16F877 microcontroller.
Ang indikasyon ng bilang ng mga pagliko at diameter ng wire ay ipinapakita sa isang apat na digit na LED indicator. Kapag pinindot ang "D" na buton, ang diameter ng wire ay ipinapakita; kapag pinindot, ang bilang ng mga pagliko ay ipinapakita.
Para baguhin ang diameter ng wire, pindutin ang "D" na button at gamitin ang "+", "-" na mga button para baguhin ang value. Ang nakatakdang halaga ay awtomatikong nai-save sa EEPROM. Button "Zerro" - nire-reset ang counter. Ang "ISCP" connector ay ginagamit para sa pagprograma ng microcontroller.
P.S. Walang mga mekanikal na guhit dahil ang aparato ay ginawa sa isang kopya, at ang disenyo ay nabuo sa panahon ng proseso ng pagpupulong.
Sa disenyong ito, ginamit ang mga disassembled na elemento at assemblies (hindi minarkahan) mula sa mga VCR at printer.
Sa anumang kaso hindi ko igiit ang eksaktong pag-uulit ng disenyo na ito, ngunit sa paggamit lamang ng anumang mga node mula dito sa aking mga disenyo.
Ang pagpaparami ng device na ito ay posible ng mga bihasang radio amateur na may mga kasanayan sa pagtatrabaho sa mechanics at nagagawang baguhin ang disenyo upang umangkop sa kanilang mga kasalukuyang bahagi ng makina.
Ang mekanikal na bahagi, nang naaayon, ay maaaring ipatupad nang iba.
Ang mga gearbox sa mga makina ay maaaring may ibang dibisyon.
Mga kritikal na elemento:
Para gumana nang tama ang programa, dapat matugunan ang ilang kundisyon, ibig sabihin;
Optical sensor "17" Fig. 1., ay maaaring may ibang disenyo, ngunit dapat ay may 18 butas.
Ang positioner screw ay dapat may pitch na 1.25 mm - ito ay isang standard na pitch para sa screw na may diameter na 8 mm.
Positioner stepper motor 48 steps/revolution, 7.5 degrees/step - ito ang mga pinakakaraniwang motor sa office equipment.
Demonstration video ng makina:
Sa ibaba sa attachment (sa archive) ang lahat ng kinakailangang mga file at materyales para sa pag-assemble ng winding machine ay nakolekta.
Kung ang sinuman ay may anumang mga katanungan tungkol sa pagpupulong at pag-setup, mangyaring tanungin sila sa forum. Susubukan kong sumagot at tumulong kung maaari.
Nais ko kayong lahat ng good luck sa iyong pagkamalikhain at ang lahat ng pinakamahusay!
I-archive ang "Winding machine"