Dławiki do impulsowych przetwornic napięcia. Przetwornice DC/DC
Często w amatorskiej praktyce radiowej istnieje potrzeba uzyskania różnych stabilizowanych napięć do zasilania urządzeń. Najczęściej celom tym służą:
- stabilizatory parametryczne(w oparciu o diodę Zenera przy niskim poborze prądu przez urządzenie);
- stabilizatory liniowe na bazie tranzystora lub w oparciu o stabilizatory LM78XX, LM317. Obecne możliwości takich stabilizatorów są ograniczone do 1,5 ampera. Ponadto kolejnym czynnikiem ograniczającym zakres zastosowań tych stabilizatorów jest konwersja napięcia wejściowego na napięcie wyjściowe z wydzieleniem dużej ilości ciepła, to znaczy, jeśli napięcie wejściowe wynosi 20 woltów, a stabilizator z napięciem wyjściowym zostanie użyte napięcie 9 woltów, wówczas dodatkowe 11 woltów zostanie zamienione na ciepło. W tym przypadku obudowa układu scalonego nagrzewa się do dość wysokich temperatur i do jej usunięcia potrzebny jest radiator, pasta termoprzewodząca, a przy dużych prądach obciążenia wymuszone chłodzenie przez wentylator, co również wymaga zasilania;

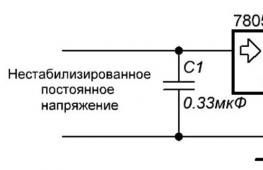
- stabilizatory pulsu. Stabilizatory te przekształcają napięcie wejściowe prądu stałego na oscylacje impulsowe z późniejszą stabilizacją. Jednym z przedstawicieli tego sektora stabilizatorów jest układ scalony LM2596. Zasadniczo jest to przetwornik impulsów z dużą liczbą trybów pracy. Ze względu na brak jakichkolwiek procesów liniowych w wewnętrznym świecie układu scalonego straty ciepła na ciele są minimalne. Podłączenie mikroukładu wymaga minimalnej liczby załączników, w zależności od wymaganych celów. Typowe połączenie pokazano na rysunku.

Najbardziej udanym rozwiązaniem dla radioamatorów i rzemieślników jest wdrożenie tego mikroukładu w wersji regulowanej - LM2596ADJ. Arkusz danych można zobaczyć tutaj.


W oparciu o mikroukład chiński przemysł ludowy produkuje szeroką gamę gotowych modułów przetwornic DC-DC, zarówno buck, jak i boost. Jednym z nich jest moduł obniżający napięcie DC-DC.

Produkt posiada następujące cechy:
- napięcie wejściowe: 4 V ~ 35 V
- Napięcie wyjściowe: 1,23 V ~ 30 V
- Prąd wyjściowy: 2A (nominalny), 3A (maks. z radiatorem)
- wydajność konwersji: 92%
- tętnienie wyjściowe:< 30 мВ
- częstotliwość konwersji: 150 kHz
- zakres temperatur pracy: - 45 ~ + 80 C (wskaźniki bardzo warunkowe)
- rozmiar modułu: 43 * 21 * 14 mm.
Jedyne, co jest wymagane przed rozpoczęciem pracy, to ustawić wymagane napięcie wyjściowe na biegu jałowym i sprawdzić je pod obciążeniem.


Należy pamiętać, że napięcie wejściowe musi być co najmniej o 1,5 V większe od napięcia wyjściowego. W razie potrzeby instalując grzejnik na chipie i stosując wymuszone chłodzenie, można osiągnąć prąd wyjściowy 4,5 ampera. Jednak ten tryb pracy jest ekstremalny i ze względu na niski koszt modułu lepiej jest używać kilku z nich równolegle. Podobnie jak w przypadku LM78XX, w oparciu o te moduły można budować zasilacze bipolarne.

W tym celu zamiast kondensatora wejściowego (C1, C2), stabilizatorów LM7805 (itp.) i kondensatorów wyjściowych należy zamontować monitorowane moduły obniżające napięcie. Oprócz powyższych cech moduł posiada zabezpieczenie zwarciowe i temperaturowe. Gdy mikroukład osiągnie temperaturę 125 stopni Celsjusza, działanie układu scalonego zatrzymuje się i wznawia dopiero po jej spadku. Dlatego bardzo, bardzo trudno jest wyłączyć moduł IC.
W mojej praktyce używałem tych modułów do zasilania ładowarek do akumulatorów litowych (w połączeniu z kontrolerem ładowania), radioodbiorników, odtwarzaczy mp3 i wydajnych diod LED z rezystancyjnym ograniczeniem prądu. Jednym słowem zakres zastosowania modułu jest dość szeroki.
Dla porównania radioodbiornik najpierw zasilałem ze stabilizatora na bazie LM7809 z prostownikiem sieciowym na transformatorze, następnie wymieniłem układ LM7809 na ten moduł. W rezultacie zniknęło tło o niskiej częstotliwości w głośniku. Niestety producent modułu nie zamontował na wejściu diody zabezpieczającej, która zapobiegnie awarii układu na skutek odwrócenia zasilania, ale można to zrobić samodzielnie. Specjalnie dla witryny - Nikolay Kondratyev, Donieck
Omów artykuł ZATRZYMAJ KONWERTERY
5. Przełączanie przetwornic DC-DC
Rysunek 5.1
IPPN służą do zmiany wartości napięcia stałego. Służą do zasilania obciążenia stałym napięciem U N, różnym od napięcia źródła zasilania E. W takim przypadku czasami konieczna jest stabilizacja U n, gdy E i prąd obciążenia zmieniają się lub zmieniają U n zgodnie z pewnym prawem niezależnie od E
Napięcie wyjściowe takich przetwornic charakteryzuje się ciągiem prostokątnych impulsów o czasie trwania t i przerwie t p (rysunek 5.1), których amplituda jest bliska E, oraz średnia wartość napięcia wyjściowego U n.
Zasada działania IPPN opiera się na kluczowym trybie pracy półprzewodnikowego urządzenia sterującego, które okresowo włącza źródło zasilania E do obwodu wyjściowego przetwornicy.
5.1. Metody regulacji impulsowego napięcia stałego
Regulacja napięcia wyjściowego IPPN odbywa się metodami impulsowymi poprzez zmianę parametrów sygnałów wyjściowych. Najczęściej stosowanymi metodami są metody szerokości impulsu, metody częstotliwości impulsu i ich kombinacje.
Metoda sterowania szerokością impulsu (PWM) odbywa się poprzez zmianę czasu trwania (szerokości) impulsów wyjściowych t i przy stałym okresie powtarzania T=const;  . Średnia wartość napięcia wyjściowego przetwornicy przy WID:
. Średnia wartość napięcia wyjściowego przetwornicy przy WID:
 ,
(5.1)
,
(5.1)
Gdzie  - współczynnik regulacji.
- współczynnik regulacji.
Zgodnie z tym wzorem zakres regulacji napięcia wyjściowego IPPN z WID wynosi od zera (t i =0; γ=0) do E (t i =T; γ=1).

Rysunek 5.2
Regulacja częstotliwości impulsów (PFR) odbywa się poprzez zmianę częstotliwości powtarzania impulsów wyjściowych  z ich stałym czasem trwania t i =const. Możliwości regulacyjne konwertera charakteryzują się stosunkiem:
z ich stałym czasem trwania t i =const. Możliwości regulacyjne konwertera charakteryzują się stosunkiem:  (5.2)
(5.2)
Napięcie wyjściowe E odpowiada maksymalnej częstotliwości powtarzania impulsów równej  i zerowe napięcie wyjściowe
i zerowe napięcie wyjściowe  .
.
Łączne zastosowanie SHIR i CHIR polega na zmianie dwóch parametrów impulsów wyjściowych t i oraz  i nazywa się kombinowanym.
i nazywa się kombinowanym.
Rozważmy najczęstsze zasady konstruowania schematów IPP (rysunek 5.2.a). Konwencjonalnie pokażemy element regulacyjny w postaci klucza, którego funkcję pełni zwykle tyrystor lub tranzystor mocy. Obwód wyjściowy zawiera obciążenie Z n o charakterze czynno-indukcyjnym i, jeśli to konieczne, dławik wygładzający L f. Czasami stosowane są bardziej złożone filtry antyaliasingowe, na przykład filtr LC w kształcie litery L. Dioda VD 0 ma na celu utworzenie obwodu przepływu prądu obciążenia, gdy przełącznik K jest otwarty.
Rozważmy procesy zachodzące w takim konwerterze. W odstępach czasu włączenia stanu t 1 -t 2, t 3 -t 4, t 5 -t 6 napięcie jest podawane na wejście filtra wygładzającego, U out = E, dioda VD 0 jest zwarta. Prąd in przepływa przez obciążenie wzdłuż obwodu (+E)-K- L f -Z n – (-E). W okresach wyłączania t 2 -t 3, t 4 -t 5 nie ma połączenia między obwodem wyjściowym a źródłem zasilania, ale prąd przez obciążenie trwa nadal. Jest wspomagany energią zgromadzoną przez elementy reaktywne – cewkę indukcyjną L f i indukcyjność obciążenia L n i jest zamykany przez VD 0 w wyniku czego U out = 0. Nie biorąc pod uwagę spadków napięcia na rezystancjach czynnych cewki L f i przewodów zasilających U n = U out, określa się je na podstawie średniej wartości U out (t) i oblicza się za pomocą wzorów 4.1 i 4.2. Prąd in składa się z odcinków wykładniczego wzrostu i spadku ze stałą czasową  . Średni prąd
. Średni prąd  .
.
Po przejściu na duże moce obciążenia (ponad 100 kW) pojawiają się trudności w konstruowaniu przetwornic zgodnie z rozważanym schematem. Są one spowodowane dużymi prądami i koniecznością stosowania dużej liczby równolegle połączonych tyrystorów. Ponadto konstrukcja dławika o dużej indukcyjności jest trudna do wdrożenia. Generatory zasilające dużej mocy wykonywane są w oparciu o zasadę wielocyklową, polegającą na równoległym połączeniu przekształtników T-separowanych pracujących na wspólnym obciążeniu ze wspólnego źródła prądu stałego.
Przetwornica napięcia podwyższającego 12 24 220 i inne…
Problem uzyskania w pojeździe ciężarowym napięcia niezbędnego do zasilania stacji radiowych, elektroniki samochodowej i sprzętu komunikacyjnego (12-14 woltów) można rozwiązać na kilka sposobów.
Najprostszym z nich jest pobranie wymaganego napięcia z jednego akumulatora. Ale konsekwencje takich „eksperymentów” są smutne: po pewnym czasie baterię trzeba będzie wyrzucić. Innym, „cywilizowanym” sposobem jest zamontowanie w samochodzie urządzenia, które pozwoli uzyskać niezbędne napięcie, nie uszkadzając przy tym standardowej instalacji elektrycznej samochodu. Obecnie produkowane są dwa typy podobnych urządzeń, zasadniczo różniące się od siebie.
Inżynierowie mają do wyboru szeroką gamę sterowników regulatorów napięcia od głównych dostawców. Nowoczesne urządzenia w dużej mierze przezwyciężyły główne wady starszych projektów, wykorzystując takie techniki, jak kontrola napięcia w modelach sterowanych napięciem i kompensacja pochylenia w modelach sterowanych w trybie prądowym.
Rezultatem tych innowacji jest to, że inżynierowie mają szeroki wybór obu typów topologii. Sterowniki sterowane napięciem są zalecane, gdy możliwe są duże wahania obciążenia linii lub wyjścia w obecności małych obciążeń w zastosowaniach z zakłóceniami oraz gdy wymagane jest wiele napięć wyjściowych z dobrą regulacją krzyżową.
Pierwsza grupa- Są to liniowe stabilizatory napięcia (adaptery). Istotą tego typu stabilizacji jest to, że „nadmiar” napięcia „pozostaje” na elemencie regulującym. W tym przypadku prąd płynący z akumulatora (Izd. rys. 1) jest równy prądowi płynącemu do obciążenia użytkowego (W. rys. 1), a ponieważ napięcie wejściowe jest dwukrotnie większe od napięcia wyjściowego, pobierana moc z akumulatora jest 2 razy większa od mocy pobieranej przez obciążenie użytkowe, tj. Wydajność takiego stabilizatora (adaptera) wynosi 50% (a w rzeczywistości nawet mniej). Spróbujmy zastąpić liczby rzeczywiste dla przejrzystości. Weźmy prąd ładunku In = 20 Amperów.
Przetworniki impulsów typu flyback i forward
Urządzenia pracujące w trybie prądowym są zalecane do zastosowań, w których moc wyjściowa to wysoki prąd lub wysokie napięcie, gdzie wymagana jest najszybsza reakcja na określoną częstotliwość, gdzie wahania napięcia wejściowego są ograniczone oraz w zastosowaniach, w których koszt i liczba komponentów muszą być utrzymywane na odpowiednim poziomie. minimum.
Zwiększona moc wyjściowa
Pozwólcie, że przedstawię na tej stronie główne tezy mojej najważniejszej tezy. Całość pracy jest zawsze dostępna do pobrania. Wybrany w tym przypadku typ jest trzeci, co oznacza, że będzie działał tylko z efektywną wartością napięcia, które dostarcza urządzenie, aby uzyskać regulację wielkości, którą chcesz kontrolować. Motywem przewodnim jest prostota projektowania i budowy, która przekłada się także na dużą efektywność ekonomiczną rozwiązania.
Rak. = Iakt. x Uacc. = 20 A x 28 V = 560 W
Rn. = W. x Un. = 20 A x 14 V = 280 W
Różnica w tych mocach (280 watów) jest uwalniana w postaci ciepła, nagrzewając grzejnik stabilizatora. Aby rozproszyć taką moc przez długi czas, potrzebny jest ogromny grzejnik. W rzeczywistości te stabilizatory (adaptery) są wykonane na znacznie mniejszych grzejnikach, co oznacza, że jeśli producent podaje, że maksymalny prąd stabilizatora wynosi 20 Amperów, wówczas możliwa będzie ciągła praca stabilizatora przy prądzie 6-7 Amperów , już nie. Przetwornice te są optymalne do zasilania stacji radiowych i sprzętu audio, ponieważ... Urządzenia te pobierają maksymalny prąd tylko przez krótki czas.
Regulacja części sygnału mocy docierającej do obciążenia; tak właśnie robią konwertery kąta fazowego. W obu przypadkach napięcie jest częściowo odejmowane, od czego rodzi się termin „częściowa transformacja”, który bezkrytycznie identyfikuje oba typy. Tutaj pokazano schemat obwodu, który jest równie ważny dla obu typów. Jak będzie oczywiste, częściowanie napięcia odbywa się za pomocą jednego lub większej liczby półprzewodnikowych urządzeń zasilających, które między zasilaniem a obciążeniem dostarczają i odłączają napięcie od tego ostatniego.
Druga grupa to urządzenia pulsacyjne. Zasadnicza różnica pomiędzy obwodami przełączającymi polega na tym, że pozwalają one uzyskać zasilacze o dużej sprawności sięgającej 90%. W takich przetwornicach „dodatkowe” napięcie nie jest rozpraszane w postaci ciepła, ale zamieniane na „dodatkowy” prąd na wyjściu. Z kolei urządzenia impulsowe można podzielić na dwie podgrupy:
Wybór strategii kontroli
Obciążenie zostaje podłączone, gdy tylko impuls uderza w bramkę dwóch tyrystorów. Po zatrzymaniu impulsu obciążenie zostaje automatycznie wyłączone, gdy tylko napięcie odwróci polaryzację. Ponieważ tak nie jest w naszym przypadku, skupiamy się na kontroli kąta fazowego. Wybór strategii sterowania ma kluczowe znaczenie dla ostatecznej wydajności. Strategia ta może faktycznie zapewnić regulatorowi możliwość doskonałego sterowania obciążeniami rezystancyjnymi, ale jest całkowicie bezużyteczna, jeśli obciążenie zawiera elementy indukcyjne.
- impulsowe stabilizatory napięcia / sprawność do 90%
- impulsowe przetwornice napięcia (zasilacze) / sprawność do 80%
Cechą charakterystyczną przetwornic impulsowych jest galwaniczna izolacja napięć wejściowych i wyjściowych (tzn. zawierają one transformator), co eliminuje nawet teoretyczną możliwość przedostania się napięcia wejściowego na wyjście w przypadku jakiejkolwiek awarii samego przetwornicy.
Aby lepiej zrozumieć problemy związane z tego typu obciążeniem, rozważ powyższy schemat. Jak już wspomniano, do sygnału wyzwalającego podawane są tylko bramki dwóch tyrystorów, z których jedna zaczyna działać i w obwodzie generowany jest prąd. Kąt wystrzelenia będzie oznaczony jako α. Na koniec tego półcyklu po kącie α pojawi się ponownie nowy sygnał wyzwalający i cykl się powtórzy. Różnica między kątem ekstynkcji a kątem wyzwalania będzie oznaczona jako δ i będzie kątem przewodzenia. W przypadku obciążenia indukcyjnego sytuacja się zmienia: załóżmy, że tyrystor T1. włącza się podczas dodatniej półfali, a następnie przepuszcza cały prąd obciążenia.
Nowoczesna podstawa elementowa i obwody pozwoliły na stworzenie przetwornic impulsowych i stabilizatorów napięcia, które zapewniają:
- Długotrwała praca przy maksymalnym prądzie obciążenia.
- Automatyczna regulacja mocy wyjściowej (nie musisz się martwić o przeciążenia, a nawet zwarcia). Sam system ograniczania mocy wykryje przeciążenie i ograniczy moc wyjściową do bezpiecznego poziomu.
- Dzięki dużej sprawności zapewnione są normalne warunki termiczne, a co za tym idzie, wysoka niezawodność i małe wymiary.
- Moc pobierana z akumulatora jest tylko o 10-15% większa niż pobiera obciążenie.
- Obecność izolacji galwanicznej napięć wejściowych i wyjściowych w przetwornicy (czyli zawiera ona transformator) eliminuje nawet teoretyczną możliwość przedostania się napięcia wejściowego na wyjście. W stabilizatorze zamontowany jest wydajny, bardzo wydajny ogranicznik napięcia.
- Być może jedyną wadą urządzeń impulsowych są możliwe zakłócenia radiowe; ich poziom zależy od producenta (kosztu) konwertera. Niedrogie przetwornice nie są zalecane do zasilania stacji radiowych i odbiorników.
Przetwornik napięcia przełączającego
Aby przekształcić napięcie z jednego poziomu na drugi, stosuje się impulsowe przetwornice napięcia prądu stałego, które wykorzystują indukcyjne urządzenia magazynujące. W takich przetwornicach moc wyjściowa jest regulowana poprzez zmianę przedziału czasowego obciążenia obciążeniem na jeden z dwóch sposobów:
Dzięki obecności składowej indukcyjnej T1 nie zostanie ona przerwana przez przejście napięcia do zera, po czym napięcie przyjmie wartość ujemną. Zamiast tego przejdzie w stan „Wyłączony”, gdy przepływający przez niego prąd zostanie anulowany, a przebiegi pokazano na rysunku poniżej po prawej. Fakt ten obejmuje asymetrię kształtu fali oraz niepożądaną wartość napięcia. Wadę tę można przezwyciężyć, stosując strategię sterowania, która wzbudza bramkę tyrystorów długim impulsem. ma to najmniejszą wadę: w rzeczywistości ciągłe sygnały bramki powodują większe straty i wymagają większego prądu.
Częstotliwość impulsów;
Szerokość impulsu.
Zasada działania impulsowego przetwornika napięcia podwyższającego polega na stworzeniu trybu tranzystorowego, podczas którego cały obwód zasilania obciążenia będzie okresowo przerywany. W ten sposób przetwornik impulsów 24 12 pozwala usprawnić wahania czasu trwania impulsów wyjściowych przy niezmienionym okresie ich zmiany. Jednocyklowy impulsowy przetwornik napięcia może pracować w zakresie mocy od 0 do 100 W. Jeżeli wymagane jest urządzenie o większej mocy, stosuje się wielocyklowy przetwornik napięcia impulsowego.
Jest to oczywiste przy sterowaniu bramą krótkim impulsem. Strategia staje się wówczas następująca. W pobliżu kanału zasilającego generowana jest kolumna impulsów dla zera. Generowana jest druga sekwencja impulsów, opóźniana o kąt równy α π w celu ponownego uruchomienia bramki.
Maksymalna konstrukcja obwodu
Cykl się powtarza i po krótkiej fazie przejściowej, podczas której nie ma idealnej symetrii, operacja przechodzi do układu, aby zapewnić odpowiednią moc obciążenia. W większości zastosowań zakres strojenia nie będzie się wahał od 0% do 100%, ale zacznie się od wyższej wartości, np. 30%; dotyczy to potrzeb użytkownika, a także ograniczeń narzuconych przez schemat użytkownika. Pierwszy z nich będzie służył do regulacji kąta α i tym samym wartości skutecznej , natomiast drugi do regulacji progu minimalnego.
Redukcja napięcia stałego. Jak działa przetwornica napięcia obniżającego napięcie? Gdzie jest używany? Opis zasady działania. Instrukcje projektowania krok po kroku (10+)
Przetwornik napięcia impulsowego obniżającego napięcie. Projekt. Obliczenie
Aby zmniejszyć napięcie prądu stałego przy minimalnych stratach i uzyskać ustabilizowaną moc wyjściową, stosuje się następujące podejście. Napięcie stałe przetwarzane jest na impulsy o zmiennym cyklu pracy. Impulsy te są następnie przepuszczane przez cewkę indukcyjną. Energia jest magazynowana w kondensatorze magazynującym. Sprzężenie zwrotne monitoruje stabilność napięcia wyjściowego i w tym celu reguluje cykl pracy impulsów.
Zostanie skalibrowany przy pierwszym użyciu w zależności od obciążenia, jakie będzie dostarczał. Poniższy rysunek przedstawia obwód rozładowywania kondensatora, którego celem jest rozładowanie ładunku resztkowego zgromadzonego w kondensatorze na końcu każdej połowy napięcia zasilania.
Konwerter do przodu wykorzystujący nienasycony transformator impulsowy
Poniższy rysunek przedstawia działanie tego obwodu; Kiedy napięcie przechodzi przez 0, pozostały ładunek w kondensatorze bezpośrednio polaryzuje dwie diody na raz, tworząc obwód, który rozładowuje napięcie resztkowe przez dwa rezystory. Obwód ma swoje własne ograniczenie ze względu na napięcie progowe obu diod: gdy napięcie spadnie do 4 V, zostają one przerwane. Okazuje się zatem, że zawsze będzie napięcie minimalne.
Jeśli nie ma potrzeby zmniejszania strat, stosuje się stabilizator ciągły szeregowy.
Zasada działania przetwornicy obniżającej napięcie opiera się na właściwości cewki indukcyjnej (dławika) do akumulacji energii. Akumulacja energii objawia się tym, że prąd płynący przez cewkę wydaje się mieć bezwładność. Oznacza to, że nie można go zmienić natychmiast. Jeśli do cewki zostanie przyłożone napięcie, prąd będzie stopniowo wzrastał; jeśli zostanie przyłożone napięcie wsteczne, prąd będzie stopniowo spadać.
Tak czy inaczej, zainstalowano obwód zabezpieczenia nadprądowego, aby chronić sterownik podczas pracy w stresujących sytuacjach. Celem tego obwodu jest przerwanie zasilania regulatora, chroniąc go tym samym przed uszkodzeniem i nadmiernym napięciem. Zainstalowano także wentylator i radiator, aby ułatwić odprowadzanie ciepła. Obwód podzielony jest na dwie części: pierwsza służy do dostosowania napięcia sieciowego 230 V, naprzemiennie z 12 napięciami ciągłymi niezbędnymi do zasilania przekaźnika, wentylatora i obwodu pomiarowego.
Do wyjścia podłączony jest wentylator i druga część układu zabezpieczającego. Termistor zmienia swoją tolerancję na zmiany temperatury, natomiast trymer jest wstępnie kalibrowany w zależności od temperatury uznawanej za krytyczną dla sprzętu. Ostatecznie końcowy obwód pokazano tutaj z boku. Można argumentować, że w ten sposób możliwa jest regulacja kąta pomiędzy π a 2π i uzyskanie w ten sposób asymetrycznego kształtu fali. W przypadku transformatora maksymalny prąd pobierany przez obwody 12 V szacuje się na 215 mA.
Oto wybór materiałów, na które warto zwrócić uwagę: Na schemacie widzimy, że jednostka sterująca D1 w zależności od napięcia na kondensatorze C2 zamyka i otwiera wyłącznik zasilania. Co więcej, im wyższe napięcie C2, im krótszy czas zamknięcia wyłącznika, czyli im niższy współczynnik wypełnienia (im większy współczynnik wypełnienia). Jeżeli napięcie na kondensatorze C2 przekroczy określoną wartość, wówczas wyłącznik całkowicie przestaje się zamykać, aż do spadku napięcia. Sposób działania tego obwodu sterującego opisano w artykule na temat modulacji szerokości impulsu. Następnie zostanie wybrany pokład 50V 1A. Przekaźnik będzie zasilany pojedynczym przełączaniem 12 V i prądem stykowym 10 A. Jeśli potrzebujesz zmobilizować urządzenia mobilne poza cywilizowanymi końmi, z samochodu, prawdopodobnie masz problem po jednodniowej wycieczce, aby zdobyć energię do akumulatorów. Jeśli zrozumiemy, że trzeba używać naszych pleców, to jasne jest, że musimy zwrócić uwagę na znaczenie i skuteczność energii poprzecznej. Zapominamy zatem o ciężkich – nawet tanich akumulatorach kwasowo-ołowiowych, z bardzo prostym stabilizatorem liniowym – ich sprawność konwersji energii jest bardzo niska. Z kolei pierwsza wartość jest niewielka do zmiany, ponieważ źródła liniowe zwykle wymagają różnic między wejściem i wyjściem, zwykle równych 5 do 3 woltów. Gdy wyłącznik zasilania jest zamknięty, prąd płynie wzdłuż ścieżki S1. W takim przypadku do cewki indukcyjnej przykładane jest napięcie równe różnicy między napięciem wejściowym i wyjściowym. Prąd płynący przez cewkę wzrasta proporcjonalnie do napięcia przyłożonego do cewki i czasu, przez jaki przełącznik jest zamknięty. Cewka magazynuje energię. Przepływający prąd ładuje kondensator C2. Jeśli więc chcesz stworzyć źródła 5 V, bateria 6 V nie będzie działać. Ponadto należy spodziewać się rozładowania baterii. Projekt jest naprawdę prosty, zawiera minimalną liczbę komponentów i naprawdę może być obsługiwany przez każdego. Jednak skuteczność tego stabilizatora zależy od różnicy między napięciem wejściowym i wyjściowym oraz przepływającym prądem. Strukturalnie, im bardziej wyraźna jest różnica w impedancji na wejściu i wyjściu stabilizatora, tym niższa wydajność i większa ilość energii uwalnianej w przestrzeń jak ciepło. Przykład obwodów tranzystorowych stopni wyjściowych przetwornic przepustnicySprawność wynosi około 30% - zależy to od różnicy napięć. Problem z regulatorami liniowymi polega zwykle na konieczności stosowania większej różnicy pomiędzy napięciami wejściowymi i wyjściowymi. Oferują kilka znaczących zalet w porównaniu z zasobami liniowymi – wyższą efektywność energetyczną, wyższe napięcia wejściowe, większe transformatory i, co najważniejsze, brak nietoperzy. Pierwsza generacja zasobów przełączanych stosowanych w naszym kraju na przestrzeni lat była budowana w sposób porównawczy do układów z czasów wcześniejszych, a obecnie istnieje ogromna liczba układów scalonych wyspecjalizowanych do tych celów. Gdy wyłącznik zasilania jest otwarty, prąd płynie wzdłuż ścieżki S2 poprzez diodę. Do cewki indukcyjnej przykładane jest napięcie wyjściowe o przeciwnym znaku. Prąd płynący przez cewkę maleje proporcjonalnie do napięcia przyłożonego do cewki i czasu otwarcia przełącznika. Przepływający prąd nadal ładuje kondensator C2. Kiedy kondensator C2ładuje się, klucz przestaje się zamykać, a kondensator przestaje się ładować. Przełącznik zacznie się ponownie zamykać, gdy kondensator C2 rozładuje się trochę pod obciążeniem. Po kompilacji 12 członków miało wspólny, twardy zasób, nad którym mógł pracować. Wady. W stosunkowo dużej zamkniętej przestrzeni uzyskana pojemność jest niewystarczająca do jednoczesnego podłączenia oświetlenia. Kolejną wadą jest wyższa cena zakupu. Możesz podłączyć taki „zasób” w ciągu kilku minut, ale ma on kilka poważnych wad. Jeśli używasz większej liczby baterii, musisz zadbać o stabilizację napięcia, nawet gdy baterie są na wyczerpaniu. Cena była naprawdę całkiem rozsądna. Wreszcie, jak zawsze, postanowiła „pogardzić” azjatycką produkcją. Kondensator C1 jest potrzebny, aby zmniejszyć tętnienie prądu w obwodzie wejściowym, aby wybrać z niego nie prąd pulsacyjny, ale średni. Zalety, wady, zastosowanieStraty energii zależą bezpośrednio od stosunku napięć wejściowych i wyjściowych. Zatem przetwornica buck może teoretycznie generować duży prąd wyjściowy przy niskim napięciu z małego prądu wejściowego, ale dużego napięcia, ale musielibyśmy przerwać duży prąd przy wysokim napięciu, co gwarantuje duże straty przełączania. Tak więc przetwornice obniżające są stosowane, jeśli napięcie wejściowe jest 1,5 - 4 razy większe niż napięcie wyjściowe, ale starają się ich nie używać, jeśli różnica jest większa. Oryginalna bateria do kameryPo zakupie działa bez problemów. Co ciekawe, akumulatory „chińskie” różnią się od siebie pojemnością i mocą. Podłączając kilka zewnętrznych komponentów można stworzyć bardzo przyzwoity zasilacz. Jeśli potrzebujesz większego prądu wyjściowego, nie ma problemu zwiększyć go dodatkowym tranzystorem mocy. Dla naszych celów ta wartość jest wystarczająca. Budowa, odrodzenie i żałoba mnichaDrugorzędnym efektem wyższej wydajności jest to, że takie źródło nie topi się i jest bardzo chłodne w działaniu. Na początku nie miałem żadnego doświadczenia z zasilaczem i baterią. Aby uniknąć konieczności wyciągania kolejnego miernika w teren, pierwsza wersja woltomierza panelowego. Przeanalizujmy proces projektowania i obliczania przetwornika obniżającego napięcie i przetestujmy go na przykładach. Na końcu artykułu pojawi się formularz, w którym możesz wypełnić niezbędne parametry źródła, przeprowadzić obliczenia online i uzyskać nominały wszystkich pierwiastków. Weźmy na przykład następujące diagramy: Schemat 1
Jednym z problemów związanych z przetwornicami obniżającymi jest trudność sterowania wyłącznikiem zasilania, ponieważ jego emiter (źródło) zwykle nie jest podłączony do wspólnego przewodu. Następnie rozważymy kilka opcji rozwiązania tego problemu. Na razie skupmy się na nieco niestandardowym włączeniu mikroukładu - kontrolera PWM. Używamy chipa 1156EU3. Stopień wyjściowy tego mikroukładu wykonany jest według klasycznego obwodu przeciwsobnego. Środek tej kaskady jest podłączony do nogi 14, emiter dolnego ramienia jest podłączony do wspólnego przewodu (noga 10), kolektor górnego ramienia jest podłączony do nogi 13. Połączymy nogę 14 ze wspólnym przewodem poprzez rezystor i podłącz nogę 13 do podstawy kluczowego tranzystora. Gdy górne ramię stopnia wyjściowego jest otwarte (odpowiada to doprowadzeniu napięcia bramki do wyjścia), prąd przepływa przez złącze emitera tranzystora VT2, noga 13, górne ramię stopnia wyjściowego, noga 14, rezystor R6. Prąd ten odblokowuje tranzystor VT2. Można w tym przypadku zastosować także sterowniki z otwartym emiterem na wyjściu. Te kontrolery nie mają dolnego ramienia. Ale nie potrzebujemy tego. Nasz obwód wykorzystuje mocny tranzystor bipolarny jako wyłącznik zasilania. Przeczytaj więcej o działaniu tranzystora bipolarnego jako wyłącznika zasilania. Tranzystor kompozytowy może służyć jako wyłącznik zasilania w celu zmniejszenia obciążenia sterownika. Jednak napięcie nasycenia kolektor-emiter tranzystora złożonego jest kilkakrotnie większe niż napięcie pojedynczego tranzystora. Artykuł na temat tranzystora złożonego opisuje, jak obliczyć to napięcie. Jeśli używasz tranzystora kompozytowego, to w formularzu obliczeniowym na końcu artykułu wskaż dokładnie to napięcie jako napięcie nasycenia kolektora - emitera VT2. Im wyższe napięcie nasycenia, tym większe straty, więc w przypadku tranzystora kompozytowego straty będą wielokrotnie większe. Ale jest rozwiązanie. Zostanie to opisane w dalszej części rozdziału poświęconego kontrolerom małej mocy. Jest napięcie wyjściowe. Od jakich elementów to zależy? Będę również bardzo wdzięczny, jeśli powiesz mi, jak poprawnie obliczyć parametry przetwornicy obniżającej napięcie 100 V na 28 V o mocy 1000 W. Z góry bardzo dziękuję. Jak zaprojektować odwracający konwerter impulsów. Jak wybrać częstotliwości... Mikrokontrolery. Opracowanie programu. Narzędzia do projektowania schematów... |

Redukcja napięcia stałego. Jak działa przetwornica napięcia obniżającego napięcie? Gdzie jest używany? Opis zasady działania. Instrukcje projektowania krok po kroku (10+)
Przetwornik napięcia impulsowego obniżającego napięcie. Projekt. Obliczenie
Aby zmniejszyć napięcie prądu stałego przy minimalnych stratach i uzyskać ustabilizowaną moc wyjściową, stosuje się następujące podejście. Napięcie stałe przetwarzane jest na impulsy o zmiennym cyklu pracy. Impulsy te są następnie przepuszczane przez cewkę indukcyjną. Energia jest magazynowana w kondensatorze magazynującym. Sprzężenie zwrotne monitoruje stabilność napięcia wyjściowego i w tym celu reguluje cykl pracy impulsów.
Jeśli nie ma potrzeby zmniejszania strat, stosuje się stabilizator ciągły szeregowy.
Zasada działania przetwornicy obniżającej napięcie opiera się na właściwości cewki indukcyjnej (dławika) do akumulacji energii. Akumulacja energii objawia się tym, że prąd płynący przez cewkę wydaje się mieć bezwładność. Oznacza to, że nie można go zmienić natychmiast. Jeśli do cewki zostanie przyłożone napięcie, prąd będzie stopniowo wzrastał; jeśli zostanie przyłożone napięcie wsteczne, prąd będzie stopniowo spadać.
Oto wybór materiałów, na które warto zwrócić uwagę: Na schemacie widzimy, że jednostka sterująca D1 w zależności od napięcia na kondensatorze C2 zamyka i otwiera wyłącznik zasilania. Co więcej, im wyższe napięcie C2, im krótszy czas zamknięcia wyłącznika, czyli im niższy współczynnik wypełnienia (im większy współczynnik wypełnienia). Jeżeli napięcie na kondensatorze C2 przekroczy określoną wartość, wówczas wyłącznik całkowicie przestaje się zamykać, aż do spadku napięcia. Sposób działania tego obwodu sterującego opisano w artykule na temat modulacji szerokości impulsu. Gdy wyłącznik zasilania jest zamknięty, prąd płynie wzdłuż ścieżki S1. W takim przypadku do cewki indukcyjnej przykładane jest napięcie równe różnicy między napięciem wejściowym i wyjściowym. Prąd płynący przez cewkę wzrasta proporcjonalnie do napięcia przyłożonego do cewki i czasu, przez jaki przełącznik jest zamknięty. Cewka magazynuje energię. Przepływający prąd ładuje kondensator C2. Gdy wyłącznik zasilania jest otwarty, prąd płynie wzdłuż ścieżki S2 poprzez diodę. Do cewki indukcyjnej przykładane jest napięcie wyjściowe o przeciwnym znaku. Prąd płynący przez cewkę maleje proporcjonalnie do napięcia przyłożonego do cewki i czasu otwarcia przełącznika. Przepływający prąd nadal ładuje kondensator C2. Kiedy kondensator C2ładuje się, klucz przestaje się zamykać, a kondensator przestaje się ładować. Przełącznik zacznie się ponownie zamykać, gdy kondensator C2 rozładuje się trochę pod obciążeniem. Kondensator C1 jest potrzebny, aby zmniejszyć tętnienie prądu w obwodzie wejściowym, aby wybrać z niego nie prąd pulsacyjny, ale średni. Zalety, wady, zastosowanieStraty energii zależą bezpośrednio od stosunku napięć wejściowych i wyjściowych. Zatem przetwornica buck może teoretycznie generować duży prąd wyjściowy przy niskim napięciu z małego prądu wejściowego, ale dużego napięcia, ale musielibyśmy przerwać duży prąd przy wysokim napięciu, co gwarantuje duże straty przełączania. Tak więc przetwornice obniżające są stosowane, jeśli napięcie wejściowe jest 1,5 - 4 razy większe niż napięcie wyjściowe, ale starają się ich nie używać, jeśli różnica jest większa. Przeanalizujmy proces projektowania i obliczania przetwornika obniżającego napięcie i przetestujmy go na przykładach. Na końcu artykułu pojawi się formularz, w którym możesz wypełnić niezbędne parametry źródła, przeprowadzić obliczenia online i uzyskać nominały wszystkich pierwiastków. Weźmy na przykład następujące diagramy:
Jednym z problemów związanych z przetwornicami obniżającymi jest trudność sterowania wyłącznikiem zasilania, ponieważ jego emiter (źródło) zwykle nie jest podłączony do wspólnego przewodu. Następnie rozważymy kilka opcji rozwiązania tego problemu. Na razie skupmy się na nieco niestandardowym włączeniu mikroukładu - kontrolera PWM. Używamy chipa 1156EU3. Stopień wyjściowy tego mikroukładu wykonany jest według klasycznego obwodu przeciwsobnego. Środek tej kaskady jest podłączony do nogi 14, emiter dolnego ramienia jest podłączony do wspólnego przewodu (noga 10), kolektor górnego ramienia jest podłączony do nogi 13. Połączymy nogę 14 ze wspólnym przewodem poprzez rezystor i podłącz nogę 13 do podstawy kluczowego tranzystora. Gdy górne ramię stopnia wyjściowego jest otwarte (odpowiada to doprowadzeniu napięcia bramki do wyjścia), prąd przepływa przez złącze emitera tranzystora VT2, noga 13, górne ramię stopnia wyjściowego, noga 14, rezystor R6. Prąd ten odblokowuje tranzystor VT2. Można w tym przypadku zastosować także sterowniki z otwartym emiterem na wyjściu. Te kontrolery nie mają dolnego ramienia. Ale nie potrzebujemy tego. Nasz obwód wykorzystuje mocny tranzystor bipolarny jako wyłącznik zasilania. Przeczytaj więcej o działaniu tranzystora bipolarnego jako wyłącznika zasilania. Można użyć tranzystora kompozytowego jako wyłącznika zasilania, aby zmniejszyć obciążenie kontrolera. Jednak napięcie nasycenia kolektor-emiter tranzystora złożonego jest kilkakrotnie większe niż napięcie pojedynczego tranzystora. Artykuł na temat tranzystora złożonego opisuje, jak obliczyć to napięcie. Jeśli używasz tranzystora kompozytowego, to w formularzu obliczeniowym na końcu artykułu wskaż dokładnie to napięcie jako napięcie nasycenia kolektora - emitera VT2. Im wyższe napięcie nasycenia, tym większe straty, więc w przypadku tranzystora kompozytowego straty będą wielokrotnie większe. Ale jest rozwiązanie. Zostanie to opisane w dalszej części rozdziału poświęconego kontrolerom małej mocy. Niestety, w artykułach okresowo znajdują się błędy; są one poprawiane, artykuły są uzupełniane, rozwijane i przygotowywane są nowe. Półmostkowy stabilizowany przetwornik napięcia przełączający,... Praktyka projektowania obwodów elektronicznych. Poradnik z elektroniki.... Przetwornik napięcia impulsowego wzmocnienia. Przycisk zasilania - bipolarny... Mocny transformator impulsowy. Obliczenie. Oblicz. Online. O... Sprawdzanie cewki indukcyjnej, cewki indukcyjnej, transformatora, uzwojenia, elementów elektrycznych... |


REGULATORY IMPULSOWE
1. Wstęp
2. Regulatory przełączające Buck
3. Zwiększenie regulatorów przełączania
4. Odwracający regulator przełączający
6. Wnioski
1. Wstęp
Zasilacze wtórne zbudowane według tradycyjnego schematu (transformator, prostownik, filtr wygładzający i stabilizator) charakteryzują się prostą konstrukcją i niskim poziomem promieniowania elektromagnetycznego. Jednakże rozpraszają znaczną moc oraz mają dużą masę i wymiary. Duże wymiary takich źródeł wynikają z faktu, że napięcie zasilania ma niską częstotliwość - 50 Hz. Prowadzi to do konieczności stosowania transformatorów o dużym przekroju rdzenia magnetycznego oraz stosowania dużych kondensatorów w filtrach wygładzających.
Wady te są również typowe dla stabilizatorów liniowych omawianych w poprzednim wykładzie. W szczególności skuteczność takich stabilizatorów często nie przekracza 50%. Niskie wartości sprawności stabilizatorów liniowych wynikają przede wszystkim z faktu, że moc wydzielana przez tranzystor sterujący okazuje się dość duża, zwłaszcza przy stabilizacji niskich napięć.
Zdecydowanie większą skuteczność zapewniają obwody, w których elementem regulacyjnym jest łącznik (przełącznik), który po pewnym okresie powtarzania T przechodzi ze stanu zamkniętego do stanu otwartego i z powrotem. Jako przełączniki stosowane są tranzystory bipolarne lub MOS. Można regulować stosunek czasu stanu otwartego (zamkniętego) klucza do okresu powtarzania T. Zmieniając ten stosunek, możemy w szerokim zakresie regulować średnie napięcie na obciążeniu. Ta metoda sterowania nazywana jest modulacją szerokości impulsu (modulacja szerokości impulsu - PWM). Z przełącznikiem szeregowo połączony jest filtr dolnoprzepustowy, który wygładza tętnienia napięcia wyjściowego do akceptowalnej wartości. Takie obwody nazywane są regulatorami przełączającymi.
Głównymi elementami zasilaczy impulsowych są dławiki, kondensatory, przełączniki sterowane i transformatory. Wszystkie te składniki mają niskie straty, idealnie równe zeru. Jeżeli rezystancja przełącznika w stanie zamkniętym jest niska, wówczas wydajność źródła impulsowego może osiągnąć 90% lub więcej. Straty energii w tranzystorze pełniącym funkcję przełącznika występują głównie podczas interwału przełączania i zależą od czasu trwania tego interwału. Dlatego im lepsze właściwości częstotliwościowe tranzystora, tym wyższa wydajność regulatora przełączającego.
Wymieńmy główne zalety pulsacyjnego IVEP.
1. Wysoka wydajność.
2. Mała waga i wymiary.
3. Możliwość uzyskania napięcia wyjściowego wyższego niż wejściowe (regulatory podwyższające).
Impulsowe źródła zasilania wtórnego umożliwiły przejście od konwersji energii elektrycznej o niskich częstotliwościach do pracy na częstotliwościach dziesiątek i setek kiloherców. Umożliwiło to znaczne zmniejszenie wymiarów i masy transformatorów oraz filtrów wygładzających. Pojawienie się potężnych tranzystorów wysokiego napięcia i materiałów o niskiej stratności na rdzenie magnetyczne transformatorów wysokiej częstotliwości umożliwiło tworzenie źródeł impulsowych z wejściem beztransformatorowym. Przy mocy wyjściowej 100 W źródła tego typu mogą mieć moc właściwą przekraczającą 200 W/dm2, podczas gdy dla tradycyjnego PVEP nie przekracza ona 20 W/dm2.
Wskażmy główne wady źródeł impulsowych.
1. Napięcia i prądy mają charakter pulsacyjny. Może to skutkować zakłóceniami o wysokiej częstotliwości w obciążeniu i sieci zewnętrznej. Aby zmniejszyć poziom zakłóceń, należy zastosować filtry antyaliasingowe, staranne ekranowanie itp.
2. Regulator przełączający i obwód sterujący komutatora tworzą układ sprzężenia zwrotnego. Aby zapewnić stabilność regulatora, wymagane są specjalne środki.
3. Zasilacze impulsowe, w tym regulatory impulsowe, są droższe i wymagają dłuższego czasu opracowania. Obwody zasilaczy impulsowych charakteryzują się większym
różnorodne zasady konstrukcyjne. Rozważaniu takich źródeł poświęcimy kilka wykładów.
Rozważmy najpierw podstawowe obwody regulatorów przełączających.
2. Regulator przełączający Buck
Obwód regulatora obniżającego napięcie pokazano na ryc. 10.1.
Elementem regulacyjnym jest przełącznik, pokazany na schemacie jako klucz. Cewka indukcyjna L i kondensator C tworzą filtr wygładzający. Częstotliwość przełączania przełącznika musi być wysoka, aby zapewnić niskie tętnienie napięcia wyjściowego. Może osiągnąć setki kiloherców i jednostek megaherców. Zwiększenie częstotliwości przełączania może znacznie zmniejszyć wagę i wymiary filtra antyaliasingowego.
Rozważmy procesy elektromagnetyczne w obwodzie na ryc. 10.1, które występują w przedziale T. Gdy przełącznik jest zamknięty, prąd cewki indukcyjnej wzrasta, a energia gromadzi się w polu magnetycznym cewki. Gdy klucz jest otwarty, prąd cewki jest zamykany przez otwartą diodę VD1. Energia zgromadzona w polu magnetycznym cewki jest wykorzystywana do utrzymania stałego napięcia wyjściowego.
Rozważmy, jak zmienia się prąd cewki indukcyjnej podczas okresu przełączania T przełącznika. Zakładamy, że pojemność kondensatora wygładzającego jest bardzo duża, dzięki czemu napięcie wyjściowe jest stałe.
Tryb pracy obwodu zależy od stanu klucza. Oznaczmy t oraz – czas, w którym klucz jest zamknięty. Rozważ następujące przedziały czasowe.
1. Przedział 0 ÷ t i . Klucz jest zamknięty. Do diody przykładane jest napięcie wsteczne i zostaje ona zamknięta. Bieżący przyrost w tym przedziale
Wykresy czasowe napięć i prądów regulatora impulsów pokazano na ryc. 10.2.

Ponieważ przełączanie odbywa się okresowo, całkowita zmiana prądu w przedziale czasu T wynosi zero:
ja = i1 |
U w t i - U na zewnątrz T |
||||
Z tej zależności wynika, że napięcie wyjściowe

To)
Wychodzisz = |
Uin = DUin. |
||
Tutaj D = T t i jest cyklem pracy impulsu.
Równość (10.1) nazywana jest charakterystyką sterowania regulatora impulsów.
Zatem napięcie wyjściowe regulatora przełączającego jest proporcjonalne do współczynnika wypełnienia impulsów komutatora. Ponieważ D< 1 , выходное напряжение всегда меньше входного. Поэтому такой регулятор называют понижающим. Величиной выходного напряжения можно управлять, изменяя коэффициент заполнения импульсов D . Такой процесс управления называется широтно-импульсной модуляцией (ШИМ). Она широко применяется не только в импульсных источниках питания, но и в других устройствах.
Wzór (10.1) obowiązuje, jeżeli prąd nie zanika w przedziale 0 ÷T. Ten tryb nazywa się tryb prądu ciągłego. Jeżeli prąd cewki indukcyjnej w dowolnym okresie czasu w przedziale 0 ÷ T osiągnie zero, to tryb prądu przerywanego.
Ponieważ pojemność kondensatora jest skończona, napięcie wyjściowe będzie pulsować. Określmy, jak wartości indukcyjności i pojemności filtra wygładzającego wpływają na amplitudę tętnienia.
Oceniając wielkość tętnienia napięcia wyjściowego, dla uproszczenia analizy przyjmujemy, że indukcyjność cewki indukcyjnej wynosi L → ∞; Prąd cewki ma w tym przypadku postać prostokątnych impulsów (ryc. 10.3). Średni prąd
Iav =(1 - D) I1 .
Jeśli pojemność kondensatora jest wystarczająco duża, jego rezystancja przy częstotliwości pierwszej i wyższych harmonicznych jest znacznie mniejsza niż rezystancja obciążenia:
1 C W tym przypadku możemy założyć, że składowa przemienna prądu jest zamykana przez kondensator. Przybliżone kształty krzywych napięcia u C (t) i prądu i C (t) pokazano na rys. 10.4. Przyrost napięcia u C 1 ò (1 - re ) ja 1 dt = (1 - re ) DT ja 1 . ty C = 1 ò Iav dt = Z otrzymanego wyrażenia wynika, że amplituda tętnienia napięcia wyjściowego nie zależy od jego wartości średniej. Aby zmniejszyć amplitudę tętnień napięcia wyjściowego, konieczne jest spełnienie warunku do ³ (1 - re ) DT ja . Du C 1 Podobnie można wykazać, że amplituda tętnienia prądu maleje, jeśli indukcyjność cewki indukcyjnej L ³ (1 - D ) DT U . D i L N W stanie ustalonym wielkość tętnienia prądu nie zależy od jego średniej wartości. 3. Regulator przełączania doładowania Obwód regulatora przełączającego doładowanie pokazano na ryc. 10,5. Gdy przełącznik jest zamknięty, dioda jest zamknięta, a do cewki indukcyjnej podawane jest napięcie wejściowe. Korzystając z założeń z poprzedniego akapitu, wyznaczamy zmianę prądu cewki indukcyjnej w przedziale 0 ÷ t oraz ty w t i . Po otwarciu kluczyka dioda się rozpali i powstanie połączenie szeregowe. Energia zgromadzona w cewce jest przekazywana na wyjście obwodu. W takim przypadku prąd cewki indukcyjnej maleje. Zmiana prądu w przedziale t i ÷ T (U na zewnątrz - U na ) (T - t i ) Ponieważ średnia wartość prądu pozostaje niezmieniona, całkowita zmiana prądu w przedziale T wynosi zero: ja 1 + ja 2 = 0 . Podstawiając wzory (10.2) i (10.3) do ostatniej równości, otrzymujemy charakterystykę sterowania obwodu pokazanego na ryc. 10,5: Wychodzisz = ty w. - D Gdy D > 0,5, napięcie wyjściowe przekracza napięcie wejściowe. Dlatego regulator z rys. Wartość 10,5 nazywa się rosnącą. Napięcie wyjściowe można regulować zmieniając współczynnik wypełnienia impulsu D. Podobnie jak w przetwornicy buck, amplituda tętnienia prądu w obwodzie na ryc. 10,3 nie zależy od jego wartości średniej. 4. Odwracający regulator przełączający Obwód regulatora odwracającego pokazano na ryc. 10.6. Podziel cykl konwersji na dwa cykle. Podczas pierwszego cyklu, gdy przełącznik jest zamknięty, prąd krąży w obwodzie utworzonym przez źródło napięcia wejściowego, przełącznik i cewkę indukcyjną. Jednocześnie energia jest magazynowana w przepustnicy. Kiedy przełącznik się otwiera, energia zmagazynowana w cewce jest przekazywana do kondensatora i rezystancji obciążenia. Określmy charakterystykę regulacyjną obwodu na ryc. 10.6. Załóżmy, że podczas każdego cyklu napięcie jest stałe, a prąd cewki zmienia się liniowo. Z zamkniętym kluczem U na zewnątrz = L T - ja 2 t i . Tutaj i 2 jest zmianą prądu w przedziale T - t i . Średnia wartość prądu na cykl konwersji powinna pozostać niezmieniona. Dlatego całkowita zmiana prądu w przedziale T ja 1 + i 2 = 0. Charakterystyka regulacyjna regulatora impulsu odwracającego U na zewnątrz = 1 - re re U na zewnątrz . 5.
Straty i sprawność regulatorów przełączających Przełącznik jest jednym z głównych źródeł strat w zasilaczach impulsowych. W zależności od topologii konwertera, przełącznik odpowiada za od 40 do 50% całkowitych strat. Krzywe napięcia i prądu w przełączniku przetwornicy impulsów obniżających pokazano na ryc. 10.7. Jako przełącznik zastosowano tranzystor MOS. Cyfra rzymska I oznacza przedziały czasowe odpowiadające zamknięciu i otwarciu klucza. Liczba II oznacza przedział odpowiadający stanowi zamkniętemu klucza. Jak wynika z rys. 10.7, główna część strat w przełączniku składa się ze strat przewodzenia i strat przełączania. Aby zmniejszyć straty przewodności, starają się zminimalizować napięcie na zamkniętym przełączniku. Kolejnym elementem mającym znaczący udział w całkowitych stratach jest dioda. Wykres prądu diody w okresie komutacji pokazano na rys. 10.8. Główną część strat w diodzie stanowią straty przewodzenia i odwrotnego odzyskiwania. Straty związane z przepływem prądu wstecznego przez diodę podczas okresu odzyskiwania wstecznego mogą być znaczne. Prąd wsteczny diody może spowodować prąd rozruchowy w przełączniku, co doprowadzi do dodatkowych strat. Aby zmniejszyć straty, stosuje się diody Schottky'ego, które mają niższe napięcie przewodzenia. Innym sposobem na zmniejszenie strat jest wymiana diody na tranzystor MOS. Efektem wymiany jest bardzo niska rezystancja kanału MOSFET. Impulsy sterujące podawane są na bramki tranzystorów MOS tak, że dolny tranzystor otwiera się dopiero po całkowitym zamknięciu górnego. To sterowanie przełącznikami MOS symuluje działanie diody i nazywa się sterowaniem synchronicznym. Określmy w przybliżeniu straty w regulatorze przełączającym obniżającym napięcie pokazanym na ryc. 10.1. Umożliwi to ocenę wpływu parametrów regulatora na wielkość strat sprawności rozpatrywanego obwodu. Aby uprościć obliczenia, przyjmujemy następujące założenia. 1. Rozważymy charakterystykę prądowo-napięciową przełącznika jako fragmentarycznie liniową (ryc. 10.9). W stanie zamkniętym prąd klucza wynosi zero, a w stanie otwartym stanie, klucz ma rezystancję równą R on. Rezystancja przełącznika w stanie otwartym nie zależy od przepływającego przez niego prądu.